
Das sind zwei Guides in einem vereint! Zwei verschiedene Arten der Aufhängung. Einen, mit dem Sie wahrscheinlich vertraut sind, und einen, mit dem Sie wahrscheinlich nicht vertraut sind. Beides ist wirksam. Ich habe bereits beide Aufhängungen nur mit den Bildern erfolgreich gebaut.
Haftungsausschluss: Diese Anleitung hält den Aufbau der Aufhängung so einfach wie möglich. Es soll funktionieren und eine Grundlage oder Idee für zukünftige Aussetzungen bieten, die SIE vornehmen könnten. Es soll nicht gut aussehen.
Inverse Piston Suspension Guide

Dies ist eine Art von Aufhängung, die in der Werkstatt wahrscheinlich äußerst selten zu sehen ist.
Jede einzelne Aufhängung auf allen 4 Seiten ist exakt gleich. Kopieren Sie einfach die Aufhängung und fügen Sie sie ein und/oder spiegeln Sie sie, um den Bau schneller abzuschließen.
Zusätzliche Informationen:
Alle Kolben sind eingestellt auf:
- Federsteifigkeit:0,01
- Aktormodus:Feder
Jeder andere Aktor ist eingestellt auf:
- Aktormodus:Physikgesteuert
Achse:
- Aufhängungssteifigkeit:100
- Federweg:0
- Wenderadius:30
- Die Basis erstellen
Erstellen der Basis
Beginnen Sie mit einem 5×6 Scalable Brick 1s. Füge einen Fahrersitz und einen Motor hinzu.
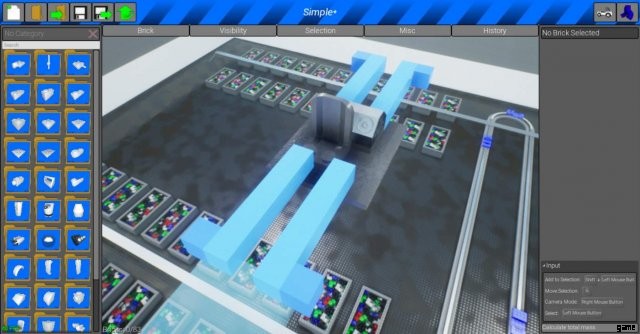
Fügen Sie einen skalierbaren 1×6-Würfel und einen skalierbaren 1×1-Würfel hinzu.

Füge einen 1×4 Scalable Brick 1s hinzu.
Nun ist die Basis des Fahrzeugs fertig.
Suspendierung vornehmen

Kolben hinzufügen. Stellen Sie sie im Stellantriebsmodus alle als „Feder“ ein. Stellen Sie die Federsteifigkeit auf 0,01 ein. Fügen Sie dann einen 2×1 Scalable Brick 1s hinzu.

Aktuatoroberteile hinzufügen.
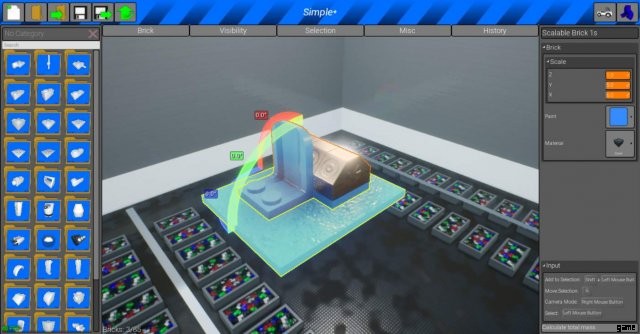
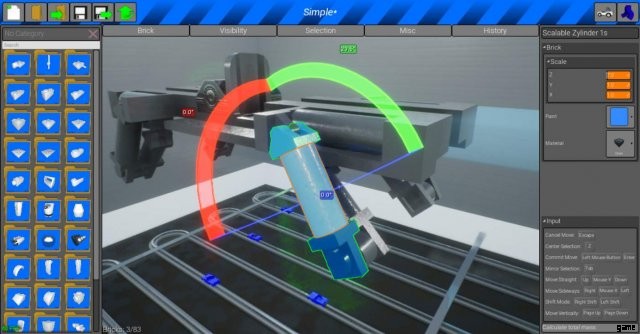
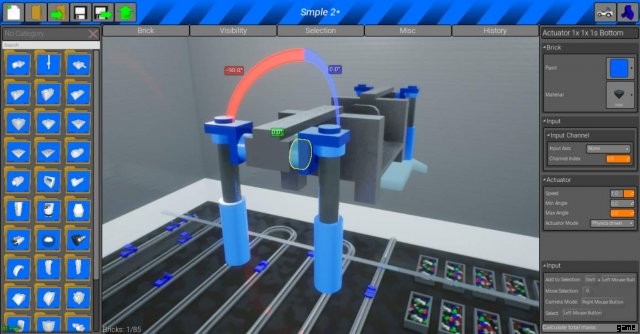
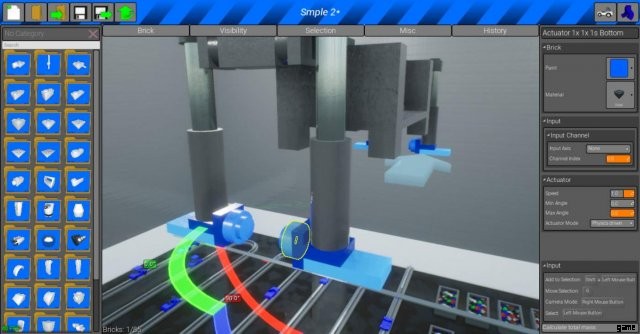
Aktuator unten hinzufügen. Stellen Sie den Aktuator als „Physics Driven“ ein. Fügen Sie dann einen 1×4 Scalable Zylinder 1s hinzu. Fügen Sie dann einen Redirector 4sx 1×1 hinzu. Alle sind in einem 45-Grad-Winkel eingestellt.

Fügen Sie ein rotierendes Aktuator-Set zu „Physics Driven“ hinzu. Fügen Sie einen skalierbaren Zylinder 1s hinzu.

Fügen Sie nun zur Seite ein Aktuatoroberteil hinzu, das auf „Physics Driven“ eingestellt ist. Fügen Sie nun einen 1×7 Scalable Zylinder 1s hinzu. Fügen Sie dann einen Redirector 4sx 1×1 hinzu.
Verbinden Sie es nun mit dem Aktuator-Oberteil.
Verwenden Sie nun Shift + Move, um die 3 Steine an ihren Platz zu verschieben. Sowohl der Redirector als auch die Aktuatorunterseite sollten grün werden, wenn sie verbunden sind. Der Winkel sollte ungefähr 30,9 betragen.
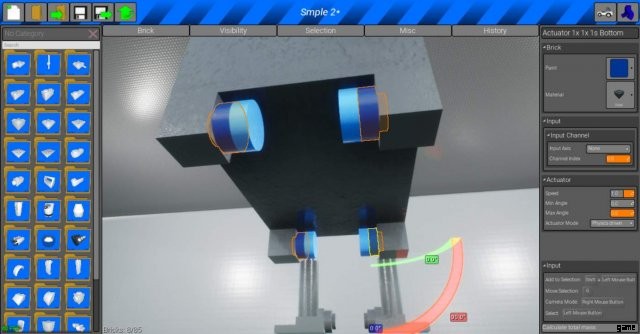
Hinzufügen der Räder
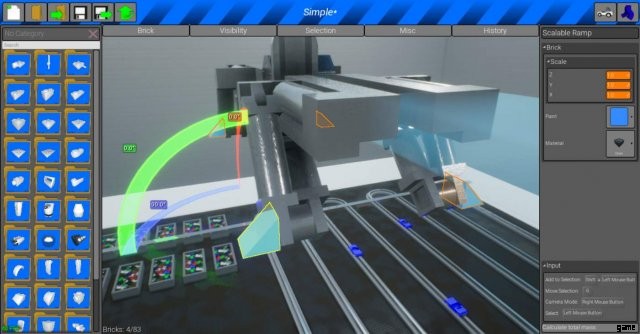
Fügen Sie eine skalierbare Rampe hinzu.
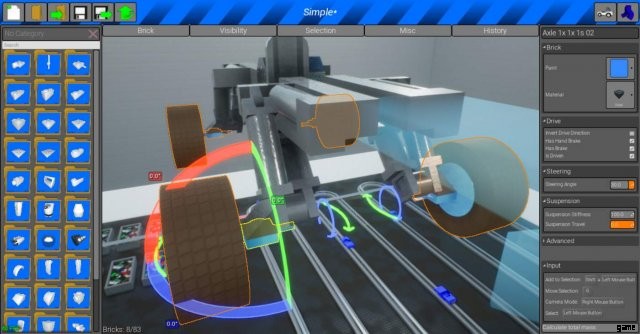
Fügen Sie Achsen und Räder hinzu. Stellen Sie die Achsen auf Federungssteifigkeit:100 Federweg:0
Normale Kolbenaufhängungsführung

Eine etwas übliche Aufhängung.
Die vordere und hintere Aufhängung sind genau gleich. Und auch im Grunde an allen vier Ecken gleich. Kopieren Sie einfach die Aufhängung und fügen Sie sie ein und/oder spiegeln Sie sie, um den Bau schneller abzuschließen.
Zusätzliche Informationen:
Alle Kolben sind eingestellt auf:
- Federsteifigkeit:0,01
- Aktormodus:Feder
Jeder andere Aktor ist eingestellt auf:
- Aktormodus:Physikgesteuert
Achse:
- Aufhängungssteifigkeit:100
- Federweg:0
- Wenderadius:30
- Die Basis erstellen
Die Basis schaffen

Beginnen Sie mit einem 5×8 skalierbaren Brick 1s. Fügen Sie einen Sitz und einen Motor hinzu. Fügen Sie dann 4 skalierbare 1×1-Würfel an den Ecken des skalierbaren Bausteins hinzu.
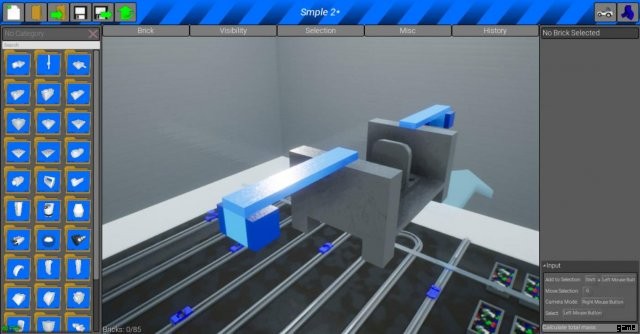
Fügen Sie einen 1×6 skalierbaren Baustein 1s hinzu. Fügen Sie dann einen skalierbaren 1×1-Würfel hinzu. Fügen Sie dann auf beiden Seiten des Würfels zwei 1×1 skalierbare Bausteine 1 hinzu.
Suspendierung vornehmen
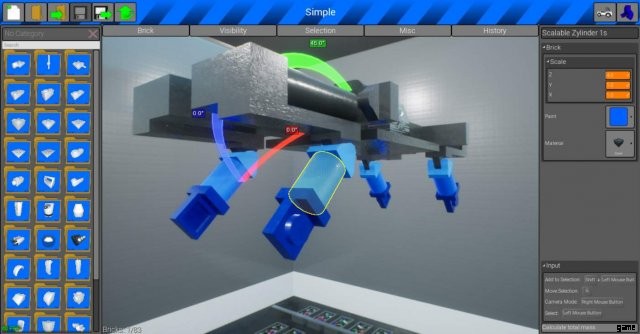
Fügen Sie ein rotierendes Aktuator-Set zu „Physics Driven“ hinzu. Fügen Sie dann einen Redirector 4sx 1x4s hinzu. Fügen Sie dann die Kolben hinzu, die auf Actuator Mode:Spring Spring Stiffness:0.01
eingestellt sind
Fügen Sie nun einen Redirector 4sx 1x4s hinzu. Fügen Sie dann ein rotierendes Aktuator-Set zu „Physics Driven“ hinzu. Fügen Sie dann einen 1×2 skalierbaren Baustein 1s hinzu.
Fügen Sie nun ein rotierendes Aktuator-Set zu „Physics Driven“ hinzu. Fügen Sie dann einen skalierbaren Zylinder 1s hinzu.
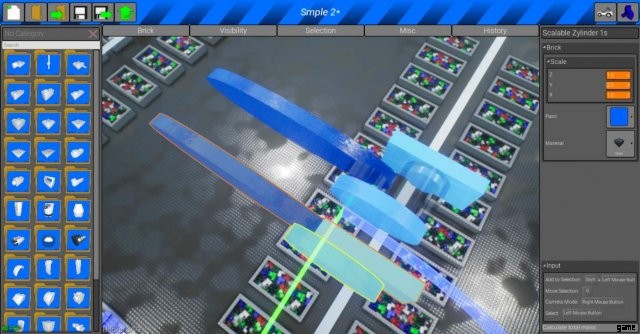
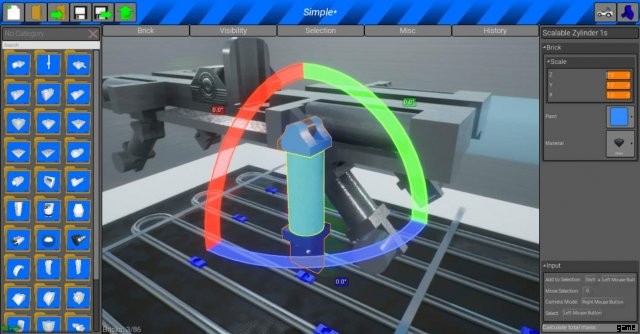
Jetzt machen Sie dies zur Seite. Beginnen Sie mit einem 1×5 Scalable Brick 1s oder einem Scalable Zylinder 1s. Dann fügen Sie einen 1×2 skalierbaren Baustein 1s oder einen skalierbaren Zylinder 1s am Ende des 1×5 skalierbaren Bausteins hinzu. Fügen Sie dann einen Redirector 2x 1x 1s am Ende der 1×2-Skalierung hinzu.

Verbinden Sie nun das, was Sie erstellt haben, mit dem skalierbaren Zylinder 1s und dem rotierenden Aktuator. Der Winkel der 3 Teile sollte 22,5/67,5 betragen
Hinzufügen der Räder

Fügen Sie Achsen und Räder hinzu. Stellen Sie die Achsen auf Federungssteifigkeit:100 Federweg:0
Fertig!
Jetzt bist du fertig! Versuchen Sie, ein Chassis zu bauen oder es nach Ihren Wünschen zu modifizieren.