
Sind diese generischen RCS-Triebwerke zu schwach für Sie? Nehmen Reaktionsräder zu viel Platz ein und entlasten Sie Ihre Energieversorgung? Oder ist Ihre Rakete einfach so massiv, so gigantisch, dass es fast unmöglich ist, sie geradeaus zu halten? Dann ist das genau das Richtige für Sie!
Verwendung von Raketentriebwerken als RCS-Triebwerke
Einführung
Einmal habe ich versucht, ein Kraftstoffshuttle mit dem größten Kraftstofftank zu bauen. Mir wurde schnell klar, dass es selbst mit Dutzenden von RCS-Triebwerken fast unmöglich war, sich zu drehen. Also kam ich auf diese Lösung!
Vielleicht ist das allgemein bekannt, aber ich habe schnell im Internet gesucht und konnte nichts darüber finden. Hoffentlich kann es Ihnen helfen!
Für den Zugriff auf den KAL-1000 Controller benötigen Sie die Breaking Ground-Erweiterung.
Engine-Platzierung
Zuerst müssen Sie die Motoren hinzufügen, die Sie als RCS-Triebwerke verwenden werden. Jeder Flüssigbrennstoffmotor funktioniert. Für diese Anleitung verwende ich den Dart LFO, weil er einen hohen Schub und einen kleinen Formfaktor hat.
Das Wichtigste, woran Sie denken sollten, ist, dass Sie beim Platzieren der Motoren keine Symmetrie verwenden können. Um sicherzustellen, dass sich alle Motoren in der gleichen relativen Position befinden, können Sie einige Strukturkomponenten radial platzieren und dann die Motoren einzeln darauf platzieren.

Genau wie bei RCS wird empfohlen, Motoren weit entfernt vom Massenmittelpunkt auf gegenüberliegenden Seiten des Fahrzeugs zu platzieren.

KAL-1000-Controller
Als nächstes sollten Sie die Controller verkabeln. Sie benötigen für jede Bewegungsachse einen Controller. In diesem Fall eine für Nicken und eine für Gieren. Wir werden jetzt den Pitch-Controller bearbeiten. Fügen Sie dem Controller die entsprechenden Motoren hinzu und stellen Sie sicher, dass der Controller die Drosselung ändert.
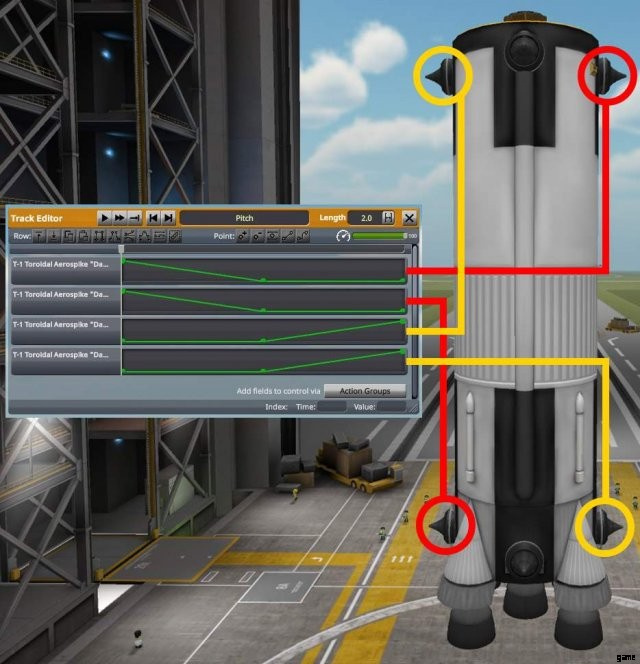
Für das Vorwärtsnicken möchten Sie, dass die Motoren auf der gegenüberliegenden Seite des Fahrzeugs aktiviert werden, damit sie ein Nettodrehmoment erzeugen. Jede Gruppe von Triebwerken, die zusammen zünden, sollte am Anfang, in der Mitte und am Ende drei Zeitachsenwerte haben:entweder [100, 0, 0] oder [0, 0, 100].
Aktionsgruppen
Schließlich müssen Sie die Pitch Axis Group an das Play Position-Feld des Controllers binden. Stellen Sie außerdem sicher, dass Sie das rechte Symbol in Absolute Control ändern. Auf diese Weise springt die Timeline beim Vorwärtspitchen an den Anfang, beim Rückwärtspitchen springt sie zum Ende und wenn Sie keine Taste drücken, bleibt die Timeline in der Mitte.

Möglicherweise müssen Sie die Richtung umkehren, damit sich die Drehungen richtig anfühlen. Wiederholen Sie diesen Vorgang nun mit allen verbleibenden Triebwerkssätzen.
Noch ein Schritt, bevor Sie fertig sind. Gehen Sie zu einer freien Aktionsgruppe und fügen Sie für jeden Motor, den Sie an einen Controller gebunden haben, Toggle Engine und Toggle Independent Thrust hinzu. Dadurch können Sie die RCS-Engines aktivieren und deaktivieren.
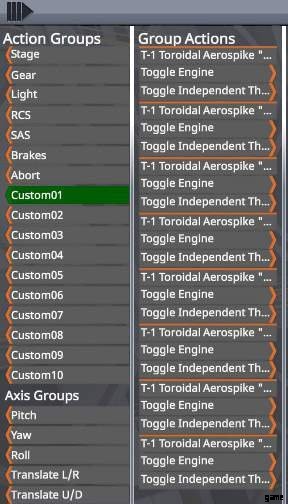
Und du bist fertig! Bevor Sie die Motoren durch Staging aktivieren, lösen Sie die Aktionsgruppe aus, um sicherzustellen, dass sie sich nicht ohne unabhängigen Schub einschalten. Sie können auch weitere Gruppen hinzufügen, z. B. für Roll- oder Lateralbewegungen.
Vor- und Nachteile
Vorteile
- Meiner Erfahrung nach ist dies die praktischste Methode, um extrem schwere Fahrzeuge zu drehen.
- Ihr Fahrzeug benötigt viel weniger Teile als wenn Sie RCS-Triebwerke oder Reaktionsräder verwenden würden, wodurch die Verzögerung verringert wird.
- Du brauchst keinen Haufen Monotreibstoff mitzunehmen, da alles LFO verwendet.
Nachteile
- Das SAS-System kann diese Motoren nicht steuern, also musst du manuell drehen. Dies kann durch die Verwendung herkömmlicher RCS-Systeme für die kleineren Anpassungen unterstützt werden.
- Treibstoff fließt nicht wie Monotreibstoff durch das ganze Fahrzeug. Möglicherweise müssen Sie Kraftstoffkanäle verwenden, um sicherzustellen, dass alle Ihre Motoren ordnungsgemäß funktionieren.
- LFO-Triebwerke wiegen viel mehr als Standard-RCS-Triebwerke. Wenn Ihr Boot jedoch groß genug ist, um diese Methode zu rechtfertigen, spielt das geringe zusätzliche Gewicht praktisch keine Rolle.
- Die Verwendung derselben Engine für mehrere KAL-Controller bewirkt, dass alle Eingaben gemittelt werden. Wenn Sie also einen Motor haben, der sowohl für Pitch als auch für Roll verwendet wird, und Sie nach vorne neigen, wird er nur auf 50 % Gas eingestellt. Derzeit habe ich die Lösung, einen zusätzlichen Satz von Engines für jede Rotation / Translation hinzuzufügen, von der sie ein Teil sein sollen.