
Der Leitfaden erklärt, wie man in Stormworks ein VTOL-Flugzeug mit Düsentriebwerken herstellt, übersetzt es aber auch in Drehflügler. Es gibt viele Möglichkeiten, ein VTOL-Manöver durchzuführen, aber ich werde mich darauf konzentrieren, die Techniken vorzustellen, die meiner Erfahrung nach mit einem 4-motorigen VTOL am besten funktionieren.
Grundlegender VTOL-Leitfaden
Grundlagen von Manövern
VTOL steht für „Vertical Take Off and Landing“. Das Konzept besteht also darin, Sie vom Boden abzuheben und wieder zu landen, ohne die horizontale Geschwindigkeit wie bei einem Flugzeug zu verwenden. Hubschrauber sind ein großartiges Beispiel für ein VTOL-Flugzeug. Sie haben 4 grundlegende Bedienelemente zum Manövrieren. Nicken (um nach vorne zu neigen und an Geschwindigkeit zu gewinnen), Rollen (um sich zu einer Seite zu neigen und sich seitwärts zu bewegen), Gieren (um das Flugzeug zu drehen, damit Sie steuern, in welche Richtung Sie zeigen) und das Kollektiv/Auf, Ab (um zu steuern, ob Sie Höhe gewinnen oder verlieren). Ein Flugzeug funktioniert auf sehr ähnliche Weise, verwendet jedoch stattdessen die Neigung, um die Höhe zu steuern. Später in der Anleitung werde ich darauf eingehen, wie Ihr Flugzeug wie ein Flugzeug in den Horizontalflug übergehen sollte.
In diesem Beispiel verwenden wir einen Jet VTOL mit 4 Triebwerken. Es funktioniert sehr ähnlich wie eine Quadcopter-Drohne. Mit 4 Motoren, einer in jeder Ecke, können Sie Nicken, Rollen und Höhe steuern.
Um das Gieren zu kontrollieren, benötigen wir auch Motorabgase, die nach vorne und hinten kippen können. Dadurch können wir später auch zum Horizontalflug übergehen.

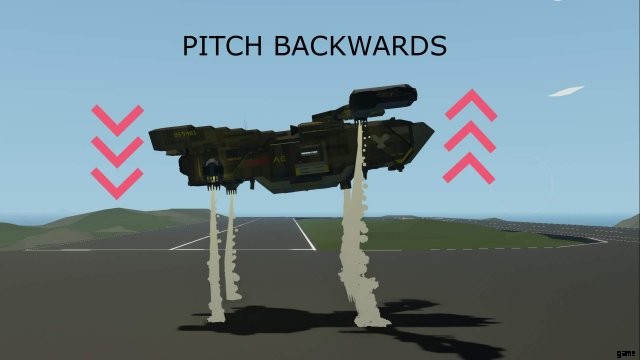
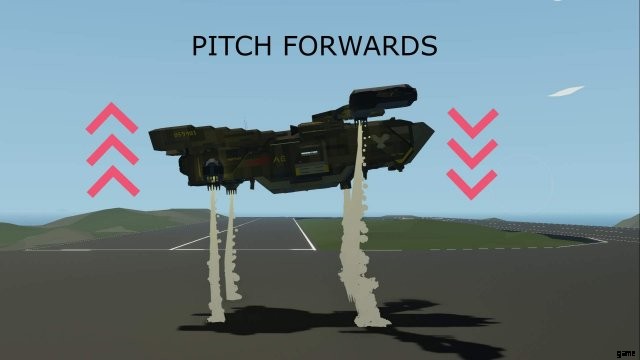
Ein Helikopter verwendet seine Neigung, um sich vorwärts und rückwärts zu bewegen, aber in unserem Beispiel verwenden wir die Neigung nur, um das Flugzeug stabil zu halten. Indem wir den Schub der 2 hinteren Triebwerke erhöhen und den Schub der 2 vorderen Triebwerke verringern, können wir das Flugzeug nach vorne und in die entgegengesetzte Richtung neigen.
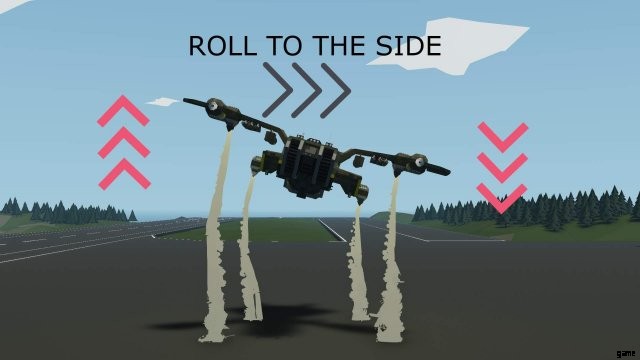
So wie wir die Schubdifferenz von den 2 hinteren und 2 vorderen Triebwerken nutzen, können wir die Schubdifferenz von den 2 linken Triebwerken und den 2 rechten Triebwerken nutzen, um von einer Seite zur anderen zu rollen. Wir verringern einfach den Schub auf der Seite oder erhöhen ihn auf der anderen Seite oder beides.
Zum Gieren müssen wir die Motordrehung verwenden. Indem wir die Triebwerke auf der einen Seite drehen, um vorwärts zu treiben, und auf der anderen Seite rückwärts, können wir das Flugzeug auf der Stelle drehen.
Eine andere zu berücksichtigende Sache ist, dass, wenn Sie gieren und Schub nach vorne und hinten senden, weniger Schub nach unten geht, um das Flugzeug in der Luft zu halten. Später kommen wir dazu, wie man das in der Logik kompensieren kann.

Das letzte Stück des Manövrierens besteht darin, die Höhe zu kontrollieren. Dies geschieht durch einfaches Erhöhen oder Verringern des Schubs aller Triebwerke. Nick-, Gier-, Roll- und Aufwärts-/Abwärtssteuerung werden in einem VTOL mit 4 Triebwerken von allen Triebwerken gleichzeitig gesteuert. Wir werden auch einen Kreisel verwenden, um all diese und Kontrollen zu stabilisieren. Zurück dazu, wenn wir zum logischen Teil kommen.
Aufbau des VTOL
Um ein Jet-VTOL zu bauen, benötigen Sie natürlich Jet-Triebwerke. Wir verwenden hier 4 Motoren, aber es ist immer möglich, mehr zu haben, solange sie sich in derselben Gruppe mit denselben Steuerungen befinden.
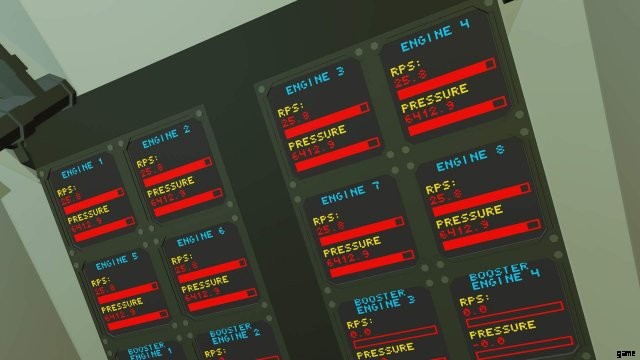
Wie dieses Beispiel hier mit insgesamt 24 Motoren in 8 verschiedenen Einheiten, aber immer noch in 4 Gruppen.
Hier ist ein Beispiel zur Engine-Platzierung.
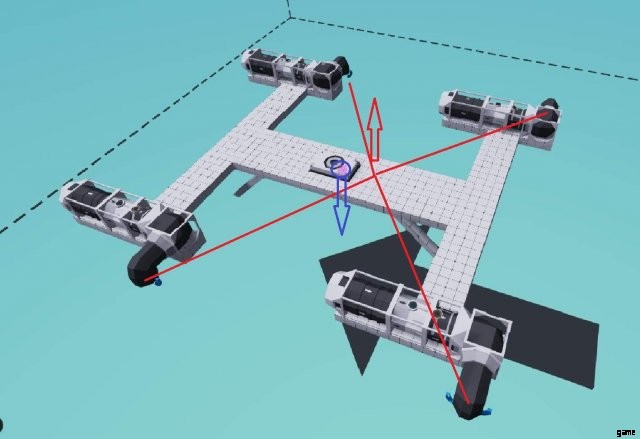
Der blaue Pfeil zeigt den Schwerpunkt an. Wenn Sie das Flugzeug auf einem Stock ausbalancieren würden, ist dies der Punkt, an dem Sie es ausbalancieren möchten. Der rote Pfeil zeigt das Zentrum des Auftriebs an. Dies ist der Mittelpunkt zwischen allen Motorabgasen. Stellen Sie sich vor, Sie wollten Ihr Flugzeug an einer Schnur festbinden. Damit es ausbalanciert an einer Schnur hängt, müsste die Schnur genau im Massenmittelpunkt gebunden werden. Bei den Motoren ist das ähnlich. Die Motoren geben Ihnen ein Auftriebszentrum, und das wirkt wie diese imaginäre Schnur. Damit Ihr VTOL perfekt ausbalanciert ist, möchten Sie, dass Ihr Massenschwerpunkt perfekt mit dem Auftriebszentrum zentriert ist. Beachten Sie, dass der beim Bau angegebene Schwerpunkt nicht das Gewicht des Kraftstoffs berücksichtigt. Was Sie also tun möchten, ist, tatsächlich einen Stock zu machen, auf dem Ihr Flugzeug genau in der Mitte des Auftriebs balancieren kann. Spawnen Sie es mit dem Treibstoff und finden Sie heraus, wo Sie den Treibstoff platzieren müssen, damit er perfekt ausbalanciert ist.

Es ist durchaus möglich, ein VTOL zu bauen, ohne das Auftriebszentrum zu finden, aber dann müssen Sie den Kreisel belasten, indem Sie ihn immer entweder nach vorne oder nach hinten neigen, oder Sie müssen vorne und hinten unterschiedliche RPS des Motors haben. Auf diese Weise werden Sie niemals ein perfekt stabiles VTOL erhalten, und es wird Ihnen eine Menge Ärger ersparen, nur den Auftriebs- und Massenmittelpunkt zu finden, sie aufeinander abzustimmen und so zu halten. Denken Sie daran, dass Sie den wahren Schwerpunkt überprüfen sollten, wenn Sie Ihrem Flugzeug mehr Gewicht hinzufügen, um es neu auszubalancieren.

Das Ziel ist es, ein VTOL zu haben, das auch in den Horizontalflug gehen kann, um die zusätzliche Geschwindigkeit zu erhalten, die ein Flugzeug anderen Transportmitteln so überlegen macht, können Sie zusätzlich zu den VTOL-Triebwerken horizontal gerichtete Triebwerke hinzufügen. Sie können ihnen dann eine viel höhere RPS als die VTOL-Triebwerke geben und Ihre Höchstgeschwindigkeit leicht verdoppeln, wenn Sie nur mit VTOL-Triebwerken fliegen.
Logik und Steuerung
Als ich vorhin über das Nicken, Rollen und Gieren sprach, sagte ich, dass Sie diese Manöver verwenden, indem Sie den Schub ändern. Um den Schub zu steuern, ändern Sie den RPS nicht. Sie verwenden stattdessen den Schubspoiler, den Sie bei allen Arten von Jet-Auspuffen finden. You can send it a number between 0 and 1 to control the thrust no matter the RPS of the engines. 0 means full thrust because there’s no spoiling, when 1 means full spoiling so it cuts all thrust. Opposite to normal engines and throttle where 1 is full throttle. But there’s ways in the logic revert it. Getting back to that later.
Now we are getting to connecting everything. Making startups for the engines and PIDs for them I’ll let you figure out on your own, but what I will tell you is that you will have to tune the engines and find out how many RPS is needed for the engines. If you followed my tip with having the true center of mass balanced with the center of lift, then you can give the same RPS to all the VTOL engines.
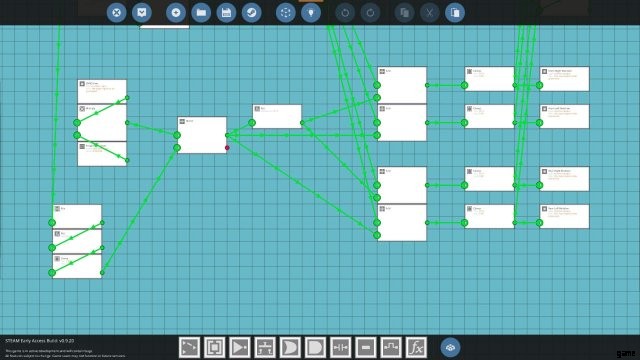
I have made a very basic microcontroller that will help you get started.
- Start by connecting the different nodes from your gyro to the microcontroller.
- Place down a linear speed sensor and preferably convert it to knots (x*1.943844).
- Connect W/S on your pilot seat to the “Forward Throttle” on the microcontroller.
- Connect A/D to the Roll on the Gyro.
- Connect Left / Right to the Yaw on the Gyro.
- Connect Up / Down to the Up/Down on the Gyro.
- Also remember to give the gyro an ON signal to the Auto-Hover. There’s no point in not having it -activated.
Now we connect the microcontroller to the engines exhausts.
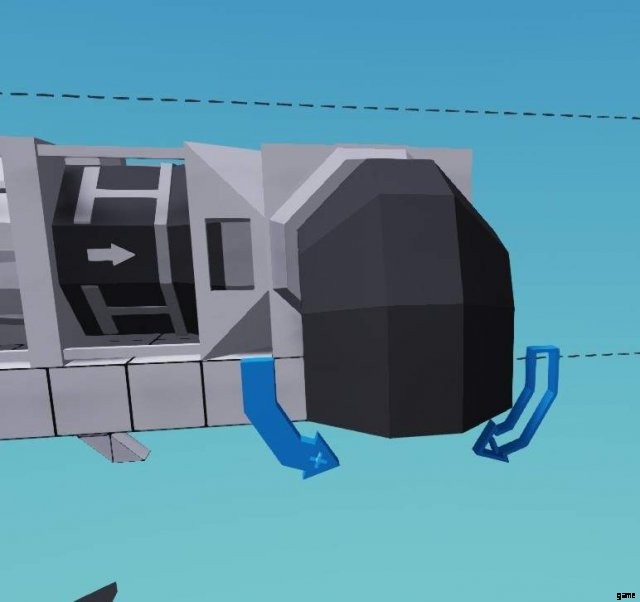
Make sure that the arrows on the rotating exhausts is pointing so that with a + signal they will point backwards. If having trouble with this use numerical inverters.
Next you just need to connect the rotation- and spoiler-number signals to the microcontroller.
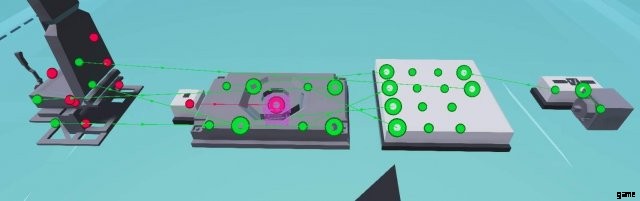
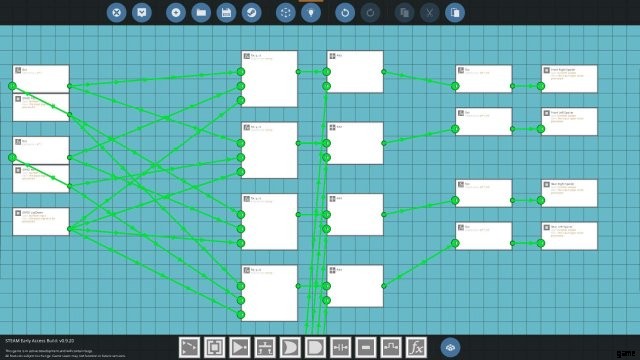
Let’s look at how the microcontroller looks like. Here we see the part of microcontroller that controls all the thrust spoilers. The Pitch, Roll and Up/Down input from the gyro comes into play here.
First, some values are inverted. Like when it pitches forwards it sends positive numbers to the rear engines, and negative numbers to the front. When it rolls to the right it sends positive numbers to the left engines, and negative numbers to right engines.
The Up / Down just goes clean into the equation with no inverting. All the values are simply added together “X+Y+Z”, where pitch=X, roll=Y and up/down=Z.
Then in the next box they get added more value from the rotation of the engine exhaust. Like I mentioned earlier, when the aircraft yaws, all engines tilt either forwards or backwards a little, meaning that less thrust is pointing downwards keeping the aircraft up. So in order to compensate, a small value of that rotation is added to the total thrust so the VTOL doesn’t loose any altitude when yawing.
Last we have function boxes with (x*-1)+1. This simply converts the signals from the gyro so that they work with the thrust spoilers which are inverted.
Next up, we have the input from the forward throttle and the speed. I won’t go into too much detail, but this small part basically tilts the engine exhaust backwards so you can fly horizontally.
The function in the bottom function box is x*(y/150).
You might want to change the number 150 lower or higher depending on the speed of your VTOL aircraft. This generally decides how fast the exhausts tilt back when you accelerate.
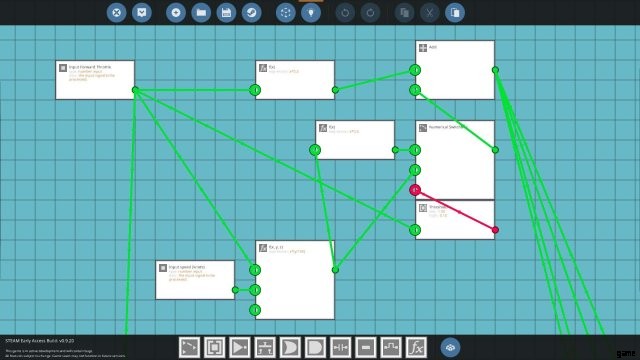
Last part of the microcontroller is the yaw and exhaust tilt. The Yaw can be very sensitive, so I added a property number that controls the sensitivity. The yaw is then divided by a value of the forward throttle so the aircraft doesn’t do any wild spins when you try to turn at low speeds. The rotation value from the forward throttle and the yaw is then added together and clamped where the final value is also sent back up to the thrust spoilers. To compensate for the loss of upwards lift when rotating. This part also makes sure that the spoilers are kept at full thrust when in horizontal flight.
Other Important Parts
So far you have hopefully have a VTOL that can take off and move around, but going into horizontal flight basically makes it into an airplane. And an airplane uses rudders and controls surfaces to maneuver. It will still need Roll control, Yaw rudder and Pitch rudders like a normal airplane.
I won’t go into detail on how to make those, but you can simply connect those control surfaces to the same gyro as the one controlling the VTOL flight.

You don’t have to use the “Jet exhaust rotating” part. You can also use entire jet engines on pivots and have several jet engines in one big engine unit. You can still use the same rotation controls from the microcontroller, but might need to recalibrate it a bit.

If the sensitivity on anything is too much or too little, the first place to start tuning it would be at the pilot seat. Don’t start changing too much in the microcontroller unless you know what you’re doing.
To gain even more speed horizontal flight you have two options.
You can make the RPS of the VTOL engines go up as you accelerate and back down to normal stable VTOL RPS when decelerating.
Or you can add additional booster engines pointing backwards like with a normal airplane. This is a much simpler version.
One final thing worth mentioning is the stability of the up/down controls from the gyro. The ingame gyros aren’t perfect in any way. When you have found an RPS value on the engines that will let you lift off, don’t go too much over it. If your RPS is too high it will start bobbing up and down. And if it is too low, then you won’t be able to lift off. So the RPS amount should be enough that you can lift off no problem, but not so much that the gyro starts making the whole aircraft jumping up and down. Using a custim gyro is always an option too.