
Dieser Leitfaden soll Hinweise geben, wie man effektive Motoren für die meisten Situationen entwickelt!
Leitfaden zum Entwerfen von Motoren
Einführung
- Dies ist eine logische Fortsetzung anderer Anleitungen zu Getrieben.
Es ist keine ausdrückliche Pflichtlektüre, wenn Sie die Funktionsweise von Getrieben bereits verstehen und/oder keine Lust haben, tief in sie einzutauchen. Ich werde versuchen, nicht die gleichen Dinge zu behandeln, die dort behandelt werden, einschließlich des Abschnitts über die Grundlagen der Engine.
Also Motoren. Sie sind ein unvermeidlicher Bestandteil der überwiegenden Mehrheit aller Builds in Stormworks. Wir behandeln den erweiterten Modus, da Sie im Gegensatz zum Basismodus etwa die Hälfte der Fahrzeugmasse in Motoren haben müssen, um es überall hin zu bringen!
In diesem Leitfaden wird davon ausgegangen, dass Sie die absoluten Grundlagen der Motormontage verstehen, d. h. wie Luft, Kühlmittel, Kraftstoff, Auspuff und Strom angeschlossen werden, und die Grundfunktionen der Getriebe-, Kupplungs- und Generatorkomponenten verstehen.
Einführung in Engines
Wir werden in diesem Abschnitt nicht auf Strahltriebwerke eingehen, da sie im Vergleich zu den anderen grundlegend anders funktionieren. Möglicherweise haben sie in Zukunft einen eigenen Abschnitt.
Es gibt grundsätzlich 3 verschiedene Arten von Engines, eine Übersicht wird nachfolgend gegeben:
Reiner Verbrennungsmotor
Sie sind in 3 verschiedenen Größen erhältlich:klein, groß und „oh Gott warum“. Die Hauptunterschiede zwischen den 3 verschiedenen Größen sind 3:Wie Sie sie anschließen, ihr „Sweet Spot“ (später besprochen) und Drehmomentwerte.
Jede Engine kann die gleiche Menge an RPS liefern, obwohl ich das deutliche Gefühl habe, dass sich dies in naher Zukunft ändern wird. Trotz dessen, was aus der Länge dieser Anleitung ersichtlich sein mag, ist die Funktionsweise der Engines wirklich einfach.
Vorteile:
- Der Stromverbrauch ist minimal.
- Benötigt keinen Generator/Lichtmaschine und nimmt auf Wunsch nur einen Bruchteil der Motorleistung auf.
- Die Leistung des Motors ist in den meisten Fällen leicht vorherzusagen.
- Ziemlich einfach einzurichten.
- (Sehr) leicht in leichten Setups.
Nachteile:
- Bei allen Motortypen wird der meiste Kraftstoff verbraucht.
- Am anfälligsten für Designfehler.
- Wird schwer, wenn Sie aufgrund von buchstäblichen Tonnen Kraftstoff eine riesige Menge an Leistung benötigen.
- Anfällig für Verzögerungen.
Hybrid / Elektrischer Hilfsantrieb
Dies sind 2 Laufwerke, die sich grundlegend unterscheiden, aber sie funktionieren so ähnlich, dass ich sie in dieselbe Kategorie einordne.
Ein Hybridantrieb schaltet zwischen einem aktiven Elektroantrieb mit hoher Batteriespannung um und schaltet den Elektroantrieb bei niedriger Batteriespannung aus, damit sich die Batterie wieder aufladen und den Kraftstoffmotor einschalten kann. Das Ziel ist ein reduzierter Kraftstoffverbrauch.
Ein elektrischer Hilfsantrieb ist zusammen mit dem Motor permanent aktiv, um ihm ein Drehmoment zu verleihen. Es ist eine Methode, einen sehr leistungsstarken Motor in einem kleinen Paket unterzubringen. Dies wirkt sich normalerweise negativ auf den Kraftstoffverbrauch aus, kann aber mit viel Herumbasteln sehr nahe daran sein, keinen Einfluss auf den Kraftstoffverbrauch zu haben.
Vorteile:
- Technisch gesehen ist es immun gegen Stalling (Electric Assist / Electric mode only).
- Hat eine hohe Stromerzeugung.
- Kann beim Drehmoment weit über seine Größenklasse hinaus schlagen (Electric Assist).
- Sehr niedriger Kraftstoffverbrauch (Hybridantrieb).
- Relativ einfacher Aufbau (elektrische Unterstützung).
- Skaliert besser auf steigende Tonnage des Fahrzeugs.
Nachteile:
- Anfällig für leere Batterien (sowie für Blitzeinschlag).
- Komplexeres Design als herkömmliche Verbrennungsmotoren (insbesondere Hybrid).
- Zu schwer in leichten Fahrzeugen (insbesondere Hybridantrieb).
- Hohes Gewicht vieler Batterien (kann neutral sein, wenn Batterien als Ballast verwendet werden können).
Rein elektrischer Antrieb mit Dieselgenerator
(Beispiel nur zur Veranschaulichung, funktioniert nicht so einfach)
Eine Konfiguration, die bei sehr großen Frachtern sowie einigen neueren Elektroautos als Backup-Generator üblich ist. Es verwendet normalerweise größere Motoren, um elektrische Energie zu erzeugen, die dann verdrängt und an anderer Stelle verwendet wird.
Vorteile:
- Sehr niedriger Kraftstoffverbrauch bei Optimierung.
- Motor(en) einfach zu optimieren, um Generatoren nach Bedarf bereitzustellen.
- Ermöglicht es, Motor und Kraftstoff überall zu haben, während der Antrieb nur wenig Platz benötigt.
- Absolut unfähig zum Hinhalten.
- Relativ einfache Einrichtung.
Nachteile:
- Überwältigend schwer im Vergleich zu anderen Optionen.
- Benötigt noch mehr Batterien und ist dadurch noch schwerer.
Grundlagen der Verbrennung (einfache Faktoren)
Ich werde diesen Abschnitt nur als Daten behalten, es gibt ein paar grundlegende Dinge darüber, wie Dieselmotoren in diesem Spiel funktionieren.
Alle diese werden Verbrennungsmotoren verwenden, also schauen Sie hier nach, wenn Sie bei einigen Designentscheidungen verwirrt sind.
Hitze
- Die Geschwindigkeit, mit der sich der Motor aufheizt, ist direkt mit seinem RPS-Wert verknüpft.
- Wir können Wärme reduzieren, indem wir Flüssigkeit (vorzugsweise Wasser) hindurchpumpen.
- Wir können diese Wärmereduktion erhöhen, indem wir mehr Flüssigkeit hindurchpumpen.
Ausgabe
- Die Drehmomentabgabe im Motor steigt mit dem RPS.
- Der RPS ist variabel, kann aber durch ein Getriebe weiter modifiziert werden.
- Die maximal mögliche RPS des Motors sinkt basierend auf der Last, die auf den Motor ausgeübt wird.
- Den Motor nur teilweise über die Kupplung einkuppeln zu lassen, reduziert die Last und ermöglicht höhere RPS.
Treibstoff
- Der Motor verbraucht keinen Kraftstoff basierend auf der Last.
- Der Motor verbraucht Kraftstoff basierend auf RPS; mehr RPS, höherer Verbrauch.
Auspuff
Anscheinend spielt es keine Rolle, solange es frei ausgegeben werden kann, kann es nur richtig gemessen werden, indem man sich den Motor ansieht, ob genügend Abgasleistung vorhanden ist oder nicht. Optisch erhalten Sie dickere Rauchfahnen, es sei denn, Sie leiten sie durch mehr Auspuffrohre.
Luft
Benötigt mehr Luft für mehr RPS am Motor, hat aber kein wirkliches Problem damit, unglaubliche Luftmengen ohne jegliche Art von Kompressor anzusaugen
Mit dieser Checkliste und nur mit dieser Checkliste können wir alle Typen und Arten von Motoren entwerfen.
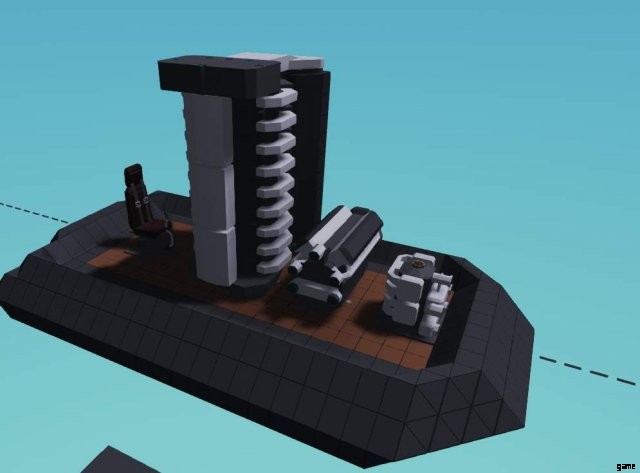
Design eines Bootsmotors (nur Verbrennungsmotor)
Alter, was wäre, wenn wir einen Dinosaurier explodieren lassen, damit ein Boot vorwärts fährt?!
Wir werden dieses alte, entkernte Schnellboot-Design von mir verwenden. Es ist ein alter Hund, der um die Version 0.4 herum erstellt wurde, was in Bezug auf die Spieleentwicklung in den rockigen 80ern liegen würde, deshalb hat es einen so albernen Namen und ein so albernes Farbschema!
Dies ist ein Build-Along, also laden Sie Stormworks und los geht's!
Der gefürchtete Theorieteil (der ist eigentlich kurz)
„Der General, der eine Schlacht verliert, stellt vorher nur ein paar Berechnungen an. „Sun Tzu, Die Kunst des Krieges
Ja, ich lasse Sun Tzus Weisheit auf dich fallen (und fülle das auf, damit es länger aussieht, als es ist).
Wir werden es mit einer Last zu tun haben (was der Motor arbeitet). Der Propeller ist am schwersten, wenn er im Wasser ist, und kann darin nur Vortrieb geben, der Widerstand des Körpers ist das einzig Bemerkenswerte, was den Propeller daran hindert, sich zu drehen. Daraus können wir ableiten, dass wir es mit einer Dauerbelastung (außerhalb der Planung!) zu tun haben.
- Das bedeutet effektiv, dass wir mit einem Gang vollkommen zufrieden sind.
- Wir haben buchstäblich unendlich viel Kühlmittel. Wir brauchen keine Kühlmitteltanks, wir können direkt Meerwasser verwenden
Der zweite Theorieteil
Das was jetzt?
Nun, wir stellen ein Boot mit einem bestimmten Design her, also betrachten wir den Teil, wie ein Boot auf dem Wasser funktioniert, und genauer gesagt, wie dieses Boot auf dem Wasser funktioniert.
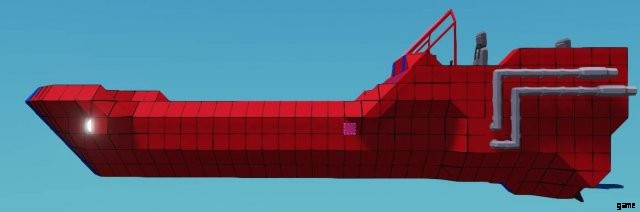
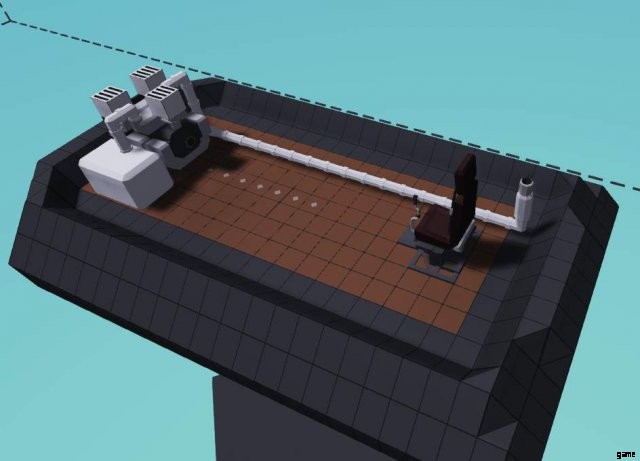
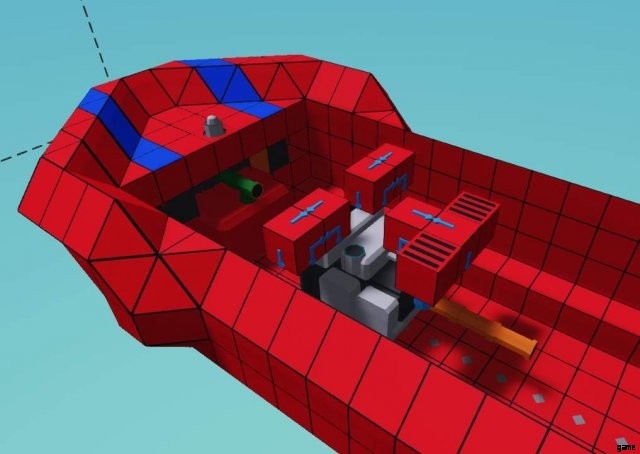
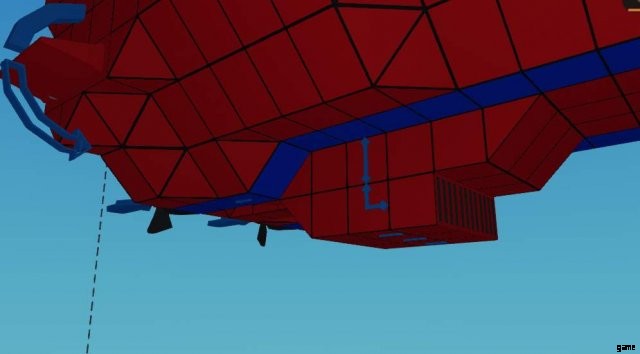
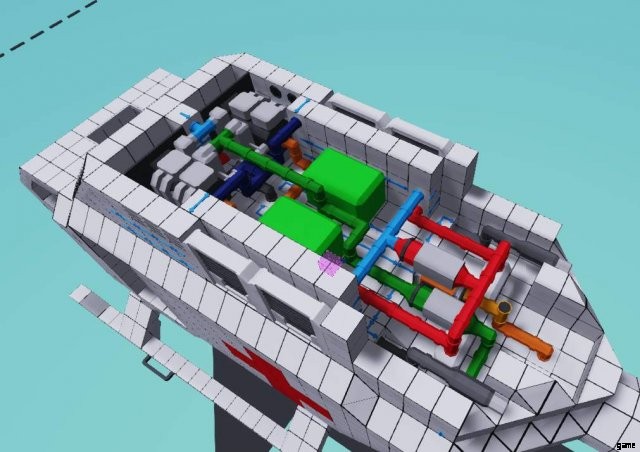
So sieht das Boot von der Seite aus, wir können das Propellerpaar rechts sehen, den Massenmittelpunkt in Pink (ich habe bereits Motoren hinzugefügt), und das ist alles, was wir wissen müssen. Lassen Sie mich etwas MS-Farbe auf das Bild auftragen.
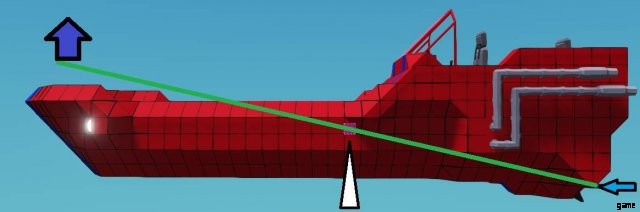
Der Massenmittelpunkt funktioniert wie der Drehpunkt (der Mittelpunkt eines Hebels) in einer Wippe. Unser Schubmittelpunkt (blauer Pfeil) liegt unter dem Massenmittelpunkt, wodurch sich die Nase anhebt (hellvioletter Pfeil). Dies ist etwas, das in einem Schnellboot wünschenswert ist, aber ansonsten nicht wünschenswert ist. Der Bug wird sich auch vom Wasser abheben wollen, weil das Wasser einen größeren Widerstand gegen Bewegung (Widerstand) hat als Luft, was ebenfalls einen Auftrieb verursacht.
Bei großen Nutzfahrzeugen sind die Stützen oft abgewinkelt, damit sie keinen solchen Auftrieb nach oben bieten. Bei Booten wollen wir im Allgemeinen das meiste Gewicht nach vorne, um diesen Auftrieb zu reduzieren, wodurch er viel besser kontrollierbar und einfacher zu handhaben ist.
Ich bin völlig durchgeknallt, was nun?
Die Theorie dient einfach dazu, zu lernen, wie man über diese kleinen Designherausforderungen nachdenkt, einige Leute können es beflügeln, andere müssen darüber nachdenken. Im Allgemeinen kommt die Fähigkeit, ein Design zu beflügeln, mit Übung.
Das Boot wird mit vorgefertigtem Rumpf und Cockpit, Kraftstofftank und Auspuffanlage geliefert. Alles andere machen wir.
Jetzt bauen wir ein paar Sachen
Ein paar Sachen bauen
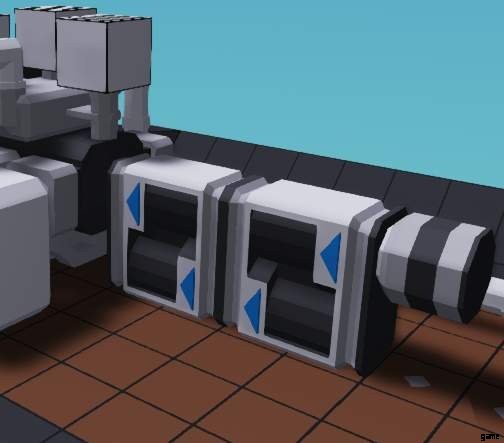
Wir brauchen 2 Motoren. Platzieren Sie sie nach vorne. Wie Sie sie platzieren, ist Ihr eigener Anruf, und wo Sie sie platzieren, ist Ihr eigener Anruf. So habe ich meine platziert. Wenn Sie Ihre Motoren auf diese Weise platzieren, stellen Sie sicher, dass Sie einen der Motoren spiegeln (U), sodass sich die Rohre auf derselben Seite befinden.
Lassen Sie uns jetzt die Kühlung anschließen, da wir ein Boot betreiben, haben wir einen ozeangroßen Kühltank.
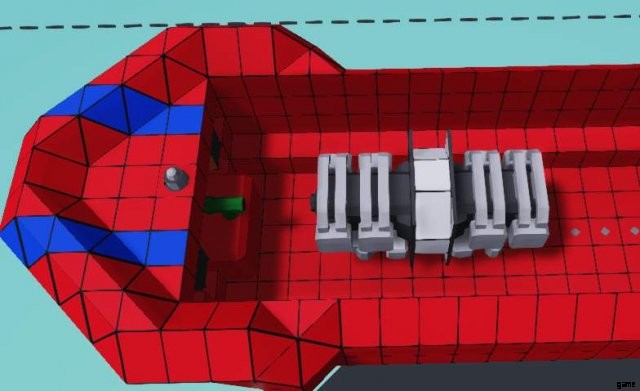
Ich machte eine kleine Verlängerung am Boden des Bootes, um Wasser aufzusaugen. Es ist mit seiner aktuellen Ausrichtung effektiv genug und braucht nicht wirklich etwas Extra, es saugt glücklich das ganze Meerwasser auf, das dagegen läuft. Sie können die Eingänge auch bündig auf den Boden legen, aber eine Ausbuchtung wie diese fügt mehr Luftwiderstand hinzu, wodurch es für diesen Teil des Bootes schwieriger wird, vom Wasser abzuheben, und es mehr Fläche gibt, um kühlendes Meerwasser anzusaugen. Du könntest hier eine Pumpe haben, aber es ist nicht unbedingt notwendig.
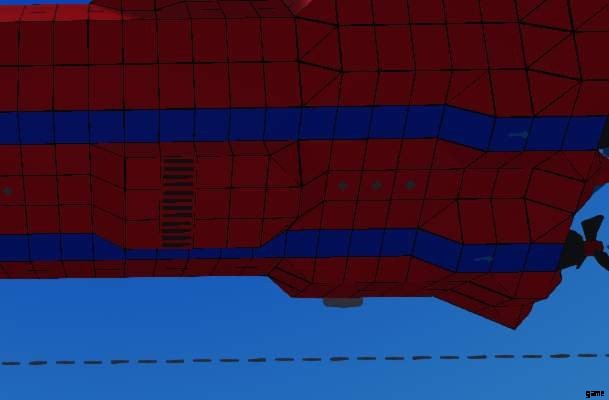
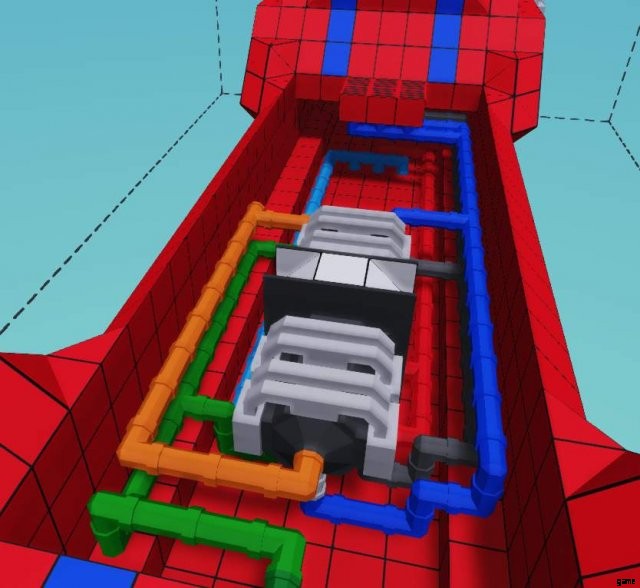
Um das heiße Kühlmittel loszuwerden, habe ich einfach ein paar Flüssigkeitsanschlüsse direkt unter der Leiter auf der Rückseite angebracht und mich dort hin verrohrt, meine Einbauten sehen jetzt so aus. Die Farbcodierung von Rohren ist gut, um sie später zu sortieren, sollten Sie tun!
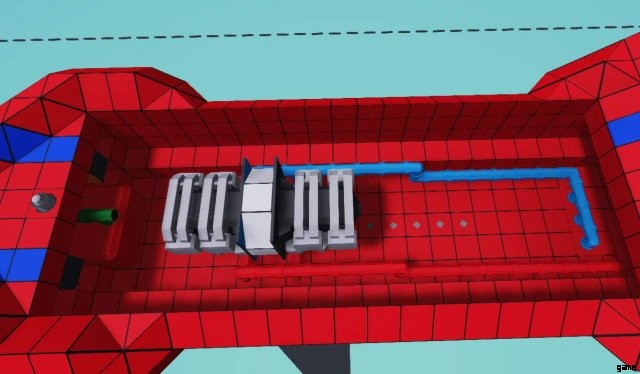
So sieht ein voll angeschlossener (mit Ausnahme der Leistung) Motor aus. Ich habe mich für einen gleichen Anschluss für die Motoren entschieden, anstatt für einen pro Propeller, es gibt Vorteile (wenn man einen Motor verliert, kann man immer noch gut geradeaus fahren) und Nachteile (Motor kann nicht gesteuert werden, etwas geringere Leistung bei Kurvenfahrten) mit dieser Art von Design, aber aus Sicht der Rohrverwaltung ist es einfacher, obwohl viel Platz vorhanden ist.
Da dies nun ein Leitfaden für das Motordesign und kein Leitfaden für das Design von Booten (zum Patent angemeldet) ist, werde ich Sie nicht durch das Anschließen von Kraftstoff, Luft und Auspuff führen. Stellen Sie einfach sicher, dass der Lufteinlass Luft erhält. Wie sie angeschlossen und gestaltet sind, liegt bei Ihnen, Sie können sogar die Kraftstoffmenge erhöhen, wenn dies der Fall ist (aber im Moment empfehle ich Ihnen, diese anderen Tanks leer zu lassen, da sie das Gewicht stark verlagern).
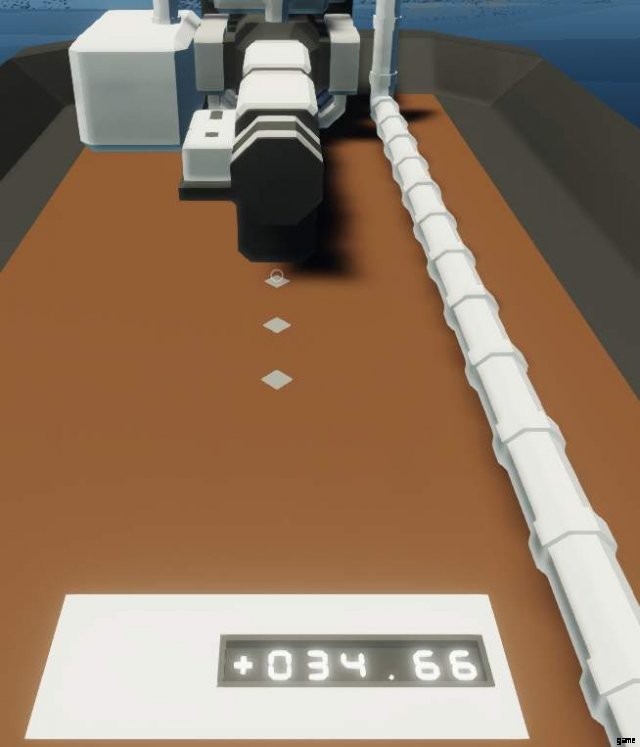
Schließen Sie jetzt die Motoren direkt an die Stützen an (dies ist zu Testzwecken), machen Sie dann die gesamte notwendige Elektronik und bauen Sie schließlich eine Abdeckung für das Fahrzeug, ohne Lücken zu lassen, damit das Ding tatsächlich schwimmen kann. Sie finden den Zündknopf vorinstalliert, schließen Sie einfach den Gashebel an w / s an oder installieren Sie einen Gashebel, wie Sie möchten. Der Tacho an diesem Ding ist kaputt (weil er alt ist), Sie können einen richtigen Tacho einbauen oder einfach so gehen, wie es sich anfühlt. Wir werden das Tuning nach einem Testlauf vornehmen!
Sie sollten zumindest diese anschließen:
- RPS.
- Hitze.
- Treibstoff.
Testergebnisse
Wir stimmen also wahrscheinlich diesen Testergebnissen zu:
- Das Ding ist höllisch schnell und ungefähr so verrückt.
- Der Versuch, mit voller Geschwindigkeit zu wenden, führt zu Katastrophen.
- Das Ding erreicht die volle RPS und kaut durch Kraftstoff.
- Es explodiert schließlich aufgrund von wahnsinniger Motorbelastung.
- Das Boot gleitet zu stark.
Umgang mit den Testergebnissen
Kommen wir zu den positiven Aspekten:
- Es ist schnell für ein normales Schnellboot mit Propellerantrieb, das ist wünschenswert.
- Es sieht toll aus.
Das sind die positiven Aspekte, allesamt. Wir wollen wahrscheinlich angreifen, wie die Motoren funktionieren, ihre RPS zu begrenzen ist eine Möglichkeit, aber da das Beladen nicht zu mehr Kraftstoffverbrauch führt, ist es meiner Meinung nach der bessere Weg, ein Getriebe mit hoher Übersetzung einzubauen, das die Motoren mit niedrigerer RPS laufen. Wir würden dies sowieso tun wollen, um einen Rückwärtsgang zu bekommen.
Installieren Sie ein Getriebe und schalten Sie es auf 1:3 (achten Sie darauf, wie Sie es installieren), und nehmen Sie es dann für einen weiteren Testlauf. Das Ziel ist es, den Testlauf mit verschiedenen Übersetzungen zu wiederholen, bis Ihre Motoren bei 8 RPS herumsitzen, was der wünschenswerte Sweetspot für kleine Motoren ist. Da unsere Motoren beide an dieselbe Antriebswelle gebunden sind, können wir davonkommen, indem wir nur die Statistiken des einen beobachten.
Beratung
Mit dem 1:3-Getriebe sollten Sie feststellen, dass wir ungefähr die Hälfte der gewünschten RPS erreichen, also würden Sie natürlich denken, dass wir die Hälfte des Getriebes brauchen, oder? Ganz so einfach ist das nicht, denn diese Dinger arbeiten auf einer Kurve. Versuchen Sie, es auf 1:2 (33 % weniger) herunterzustimmen, um zu sehen, was der Effekt ist.
Mit einem 1:2-Getriebe können Sie> 10 RPS erreichen, was bedeutet, dass wir in diesen Requisiten tatsächlich mehr Leistung abgeben als mit einem 1:1-Getriebe. Ich konnte eine Geschwindigkeit von 30 m/s erreichen, aber es war extrem unkontrollierbar. Da es einen Gang zwischen diesen beiden nicht so wünschenswerten Ergebnissen gegensätzlicher Enden gibt, können wir diesen auswählen und das 5:2 für eine Fahrt nehmen.
Schlussfolgerungen

Mit diesen Entwürfen haben wir einen guten Kompromiss für ein Getriebe gefunden und einen ziemlich anständigen Motor für ein relativ anständiges Schnellboot gemacht. Es verbraucht relativ wenig Kraftstoff für eine ziemlich solide Leistung und ist dabei irgendwie stabil.
Aber … wir könnten es besser machen, oder? Wir werden dieses Fahrzeug wiedersehen.
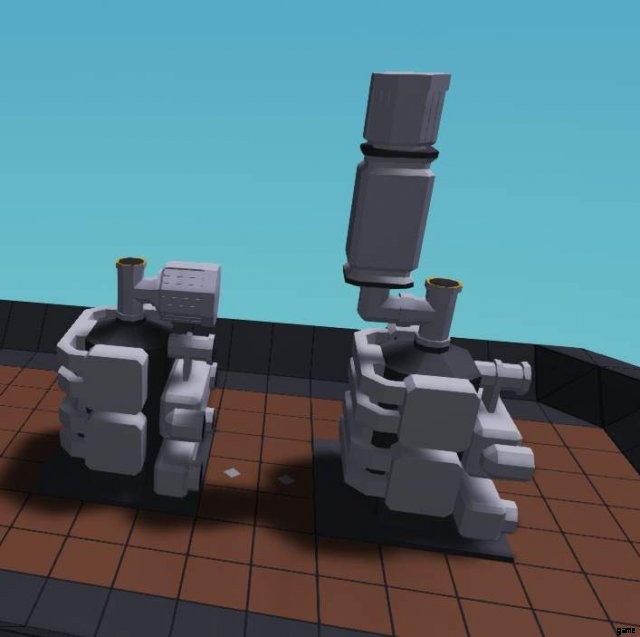
Entwurf eines Bootsmotors (dieselelektrisch)
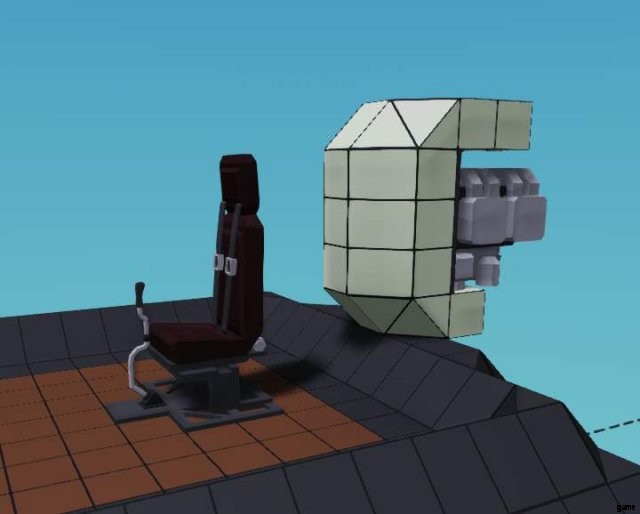
Wir verwenden dieses süße Schlauchboot als Grundlage
Wir starten gleich mit einem Paukenschlag. Bauen Sie einen Motor wie abgebildet und befestigen Sie die Flüssigkeitsanschlüsse direkt an Kühlung und Luft.
Folgen Sie ihm mit einem Auspuffrohr, das Ihnen die Abgase nicht in die Augen bläst, und einem Kraftstofftank.
Und schließlich ein Getriebepaar wie abgebildet mit einem darauf aufgeklebten Generator wie abgebildet.
Das elektrische Zeug!
Ja, wir sind tatsächlich mit dem Motor (oder besser Generator) fertig, wir werden diese Getriebe später einstellen.
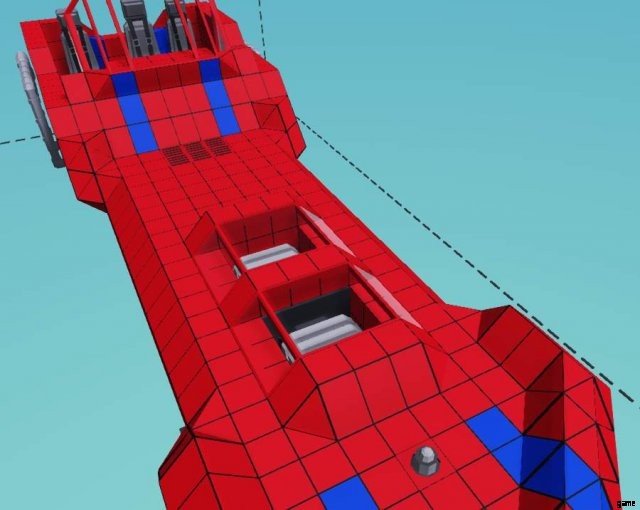
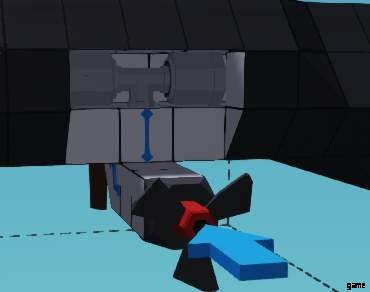
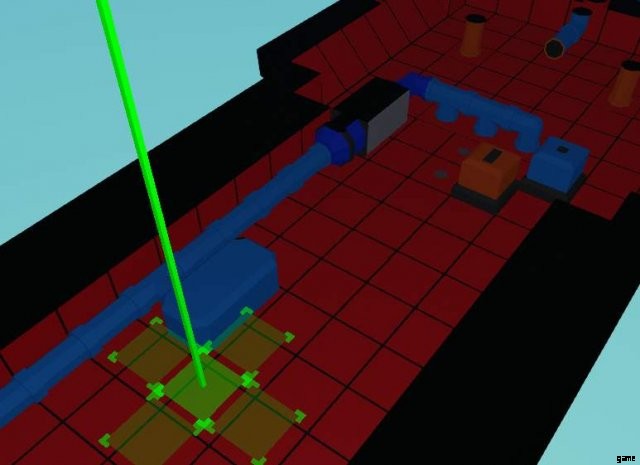
Öffnen Sie die Rückseite des Bootes (ich habe die Innenseiten weiß gefärbt, um die Innenseiten besser sehen zu können) und installieren Sie eine Stütze wie abgebildet.
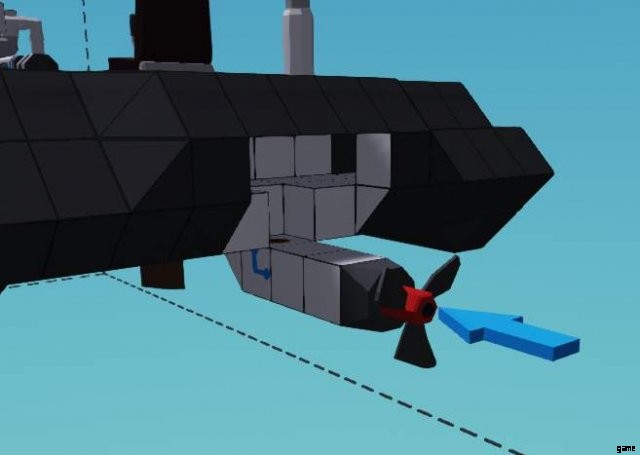
Rohr von der Stütze nach oben und befestigen Sie ein Paar Elektromotoren wie gezeigt.
Das ist der Platz, den wir für unseren Antrieb brauchen. Im Vergleich zu diesem Monstrum von früher ist es wirklich kompakt, nicht wahr (abgesehen von dem großen Motor vorne natürlich …)? Denken Sie daran, dass Getriebe keine positive Wirkung auf Elektromotoren haben!
Achten Sie darauf, das Loch zu schließen, nachdem Sie vollständig fertig sind. Das Beiboot hängt von seinem Schwimmring ab, um an der Oberfläche zu bleiben. Es ist an keiner Stelle abgetrennt, sodass es sich in ein U-Boot verwandelt, wenn keine Stellen offen bleiben.
Jetzt die Elektrik verkabeln!
Testzeit!
Verdrahten Sie eine konstante Zahl von 1 mit der Drosselklappe des Motors und einem Startknopf.
Wir machen uns hier Sorgen um 2 Dinge:Energieerzeugung und Energieabfluss. Wir sollten uns wirklich erstmal nur auf die Energiegewinnung konzentrieren.
Hier sind die Zifferblätter (oder andere Anzeigen), die wir wollen:
- Generatorausgabe (Ja, wirklich, einzig und allein).
Was wir suchen
- Höchstmögliche Generatorleistung, was sonst?
Ich weiß zufällig, dass Sie für diese Zahl ein Verhältnis zwischen 1:7 und 1:9 benötigen. Du kannst ein bisschen rechnen, oder? Für diejenigen, die zu faul zum Zählen sind:1:3 und 2:5 (oder 1:2,5) nacheinander sind 1:2,5*3 oder 1:7,5, was gut genug ist.
Auf der linken Seite sehen Sie, wonach wir als gute Generatorleistung suchen.
Testzeit, Runde 2!
Runde 2? Nun, da wir mit 2 Systemen arbeiten, müssen wir 2 Dinge testen!
Hier sind die Zifferblätter (oder andere Anzeigen), die wir wollen:
- Batterie (das Schlauchboot wird mit einem Batteriemultiplikator geliefert, was bedeutet, dass wir die %-Anzeige der Batterie erhalten können, wirklich nützlich).
- Kraftstoffkapazität (damit wir feststellen können, wie wenig Kraftstoff wir verbrauchen).
Nun, bevor wir bestimmen, wonach wir suchen … verkabeln Sie einen der Elektromotoren direkt mit dem Sitz und fahren Sie damit, bis Ihre Batterien auf etwa 80 % leer sind, schalten Sie dann den Generator ein und fahren Sie weiter.
Was dieser Mini-Test gezeigt hat, sind 3 Dinge:
- Batterien alleine sind sehr schnell leer.
- Der Generator erzeugt mehr als wir brauchen (deshalb haben wir 2 Motoren).
- Das Ding verbraucht eine vernachlässigbare Menge Kraftstoff.
Was wir suchen
In einem System wie diesem möchten Sie die Stromerzeugung des Motors so gut wie möglich nutzen, um nahezu 100 % (oder mehr, wenn Sie mit kurzen Pausen hier und da im Tausch gegen mehr Leistung einverstanden sind) Auslastung der Stromerzeugung des Motors zu erreichen.
Verkabeln Sie jetzt beide Motoren und nehmen Sie eine Fahrt damit.
Was dieser Test gezeigt hat, sind zwei Dinge:
- Es ist viel schneller, ohne den Kraftstoffverbrauch zu beeinflussen.
- Der Akku wird leer...
Das bedeutet im Grunde, dass wir unser Gas auf die Motoren aufteilen müssen. Ohne ein etwas kompliziertes automatisches System, das das Gas basierend auf einem negativen Delta (Differenz) der Batterien ausgleicht, können Sie diese Zahl erreichen, indem Sie einfach ein paar fundierte Vermutungen anstellen.
Ich habe meinen Teiler-Mikrocontroller im Schwimmteil des Beiboots gelassen, und die Zahl sollte so eingestellt sein, dass sie die Batterie beim Herumfahren leicht entlädt, aber auch eine beeindruckende Reichweite bietet.
Was haben wir also gelernt (möglicherweise):
- Der Motor vorne sorgt dafür, dass das Beiboot nicht schwimmt.
- Das Nichtgleiten verringert die mögliche Geschwindigkeit, macht aber auch die Fahrt viel stabiler.
- Ein Generatorsystem zu bauen ist sehr einfach.
- Generatoren verbrauchen sehr wenig Kraftstoff und ermöglichen es, das Antriebssystem praktisch zu verstecken.
- Batterien ohne Generator sind sehr schnell leer.
Design eines Bootsmotors (elektrische Unterstützung)
Lassen Sie uns also ein wenig über die Verrücktheit dieses Systems diskutieren.
Die elektrische Unterstützung ist etwas schwierig zu verstehen, da sie auf den ersten Blick nicht viele Vorteile zu haben scheint, und sie wird noch verwirrender, da es mehrere Möglichkeiten gibt, sie einzurichten. Was im Wesentlichen passieren wird, ist, dass Sie einen Teil der Motorleistung verwenden, um Strom zu erzeugen, den Sie dann verwenden, um den Motor zu zwingen, mit einer höheren RPS zu laufen.
Es hört sich so an, als ob es nicht funktionieren sollte, und es hört sich an, als ob es eine Übereinheit sein sollte, aber Motoren haben einen optimalen Leistungsbereich. Um es einfach zusammenzufassen:Je mehr Sie einen Motor aufdrehen, desto mehr Drehmoment erzeugt er Kurve. Der „Sweet Spot“, auf den ich mich immer wieder beziehe, ist für jeden Motor anders, bei kleinen Motoren liegt er bei etwa 8, wo nicht zu viel Kraftstoff verbraucht wird, um die betreffende Leistung zu erbringen. Wir verwenden den Elektromotor, um den Motor zum Drehen zu zwingen, ähnlich wie bei einem Anlasser.
Der sekundäre Vorteil ist, dass Sie auch ziemlich viel Strom für Ihre anderen Systeme erhalten, da dies für die Funktion dieses Dings erforderlich ist.
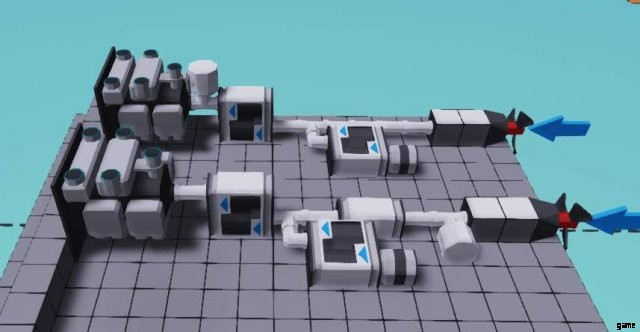
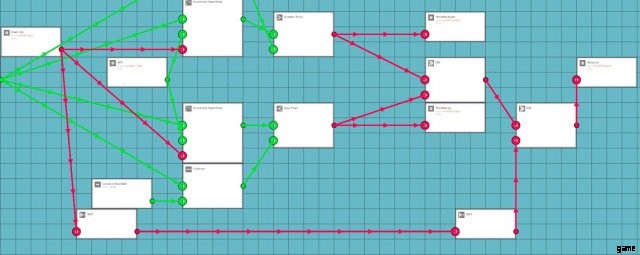
Es gibt 2 Hauptkonfigurationen für diese Art von Engine:
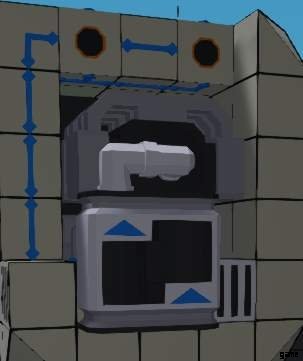
Eines, das direkt an den Motor angeschlossen ist (oben), hier ist die Drosselklappe des Elektromotors oft begrenzt, um die Auswirkungen auf die Batterien einzudämmen, wodurch Sie weniger Energie für den Generator benötigen.
Eine, die an den Ausgang angeschlossen ist, wo der Motor die Hälfte oder mehr seiner Leistung abgibt (reguliert durch die Kupplung zwischen Motor und Elektromotor), und der größte Teil des Elektromotors direkt mit dem Ausgang verbunden ist.
Diese Art von Design ist in Systemen nützlich, in denen Sie häufig rückwärts fahren müssen, sodass Sie einfach die Kupplung zwischen Motor und Leistungsausgang deaktivieren können, wodurch 100 % der Motorleistung an den Generator und 100 % der Motorleistung an den Ausgang übertragen werden , das einen getriebelosen Rückwärtsgang ermöglicht. Dies kann auch als Hybridsystem funktionieren.
Wir müssen noch einige Dinge bedenken, aber immerhin sind es nur 2 Komponenten und ihre Macken.
Generatoren:Sie hängen von RPS ab und geben mehr Leistung pro Umdrehung ab, benötigen aber als Nachteil auch mehr Drehmoment pro Umdrehung, wenn die Umdrehungen zunehmen. Das gab es vorher nicht, was es einfach machte, Overunity-Generatoren herzustellen. Wir müssen dies ausgleichen, damit wir nicht zu viel Motorleistung rauben, nur um Strom zu erzeugen.
Motoren:Sie geben bei höherer Batterieladung deutlich mehr Leistung ab … weil das elektrische System in diesem Spiel ein bisschen albern ist. Sie geben 100 % bei 100 % Batterie und fallen auf schätzungsweise 40 % der Leistung bei 50 % Batterie ab, danach fallen sie nicht mehr ab, also müssen wir die Batterie immer über 90 % halten, vorzugsweise 95 %. Das bedeutet einfach, dass wir mehr Batterien und größere Batterien brauchen.
Hören wir auf zu schwafeln und beginnen mit dem Bauen
Wir werden das gleiche Schnellboot-Design wie beim allerersten Motordesign verwenden, also holen Sie sich den Workshop-Link von dort, falls Sie es noch nicht getan haben. Unser Ziel ist es, eine annähernd ähnliche Leistung (!) zu erreichen, während nur eine kleine Engine verwendet wird.
Um mich nicht zu oft zu wiederholen, werde ich Sie nicht noch einmal durch das Anschließen des Motors führen, es wird genau so gemacht wie im Verbrennungsabschnitt, also schließen Sie es vollständig ohne Getriebe oder irgendetwas Besonderes an, versiegeln Sie das oben auf dem Schnellboot und machen Sie eine Probefahrt. Außerdem enthält dieser Leitfaden genügend Text. Wie zuvor liegen die Designentscheidungen für die Einlässe und so weiter vollständig bei Ihnen.
Die Testergebnisse
Nehmen wir uns einen Moment Zeit, um über die Faktoren hier nachzudenken:
- Die Geschwindigkeit ist gut, aber auch etwas schwer zu kontrollieren.
- Der RPS des Motors trifft auf die Kappe.
- Der Motor wird schnell heiß.
- Der Motor verbraucht viel Kraftstoff.
Lassen Sie uns diese Probleme zuerst angehen, indem wir ein Getriebe einführen. Um Zeit und Mühe zu sparen, ist ein guter Kompromiss für ein Getriebe hier eine Übersetzung von 2:3, es bringt Ihren Motor auf 9 RPS mit einer Geschwindigkeit von etwas unter 10 m/s (diese Werte zu kennen ist wichtig für die Abstimmung). Es behandelt vorerst alle Probleme und tötet die Geschwindigkeit, aber das ist nur vorübergehend.
Lass uns das Boot elektrifizieren! Strom ist super effektiv gegen Wasser!

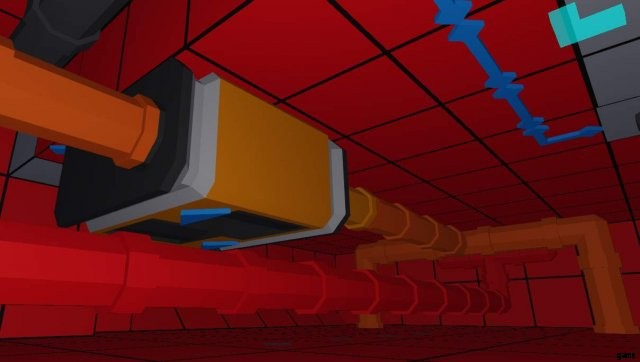
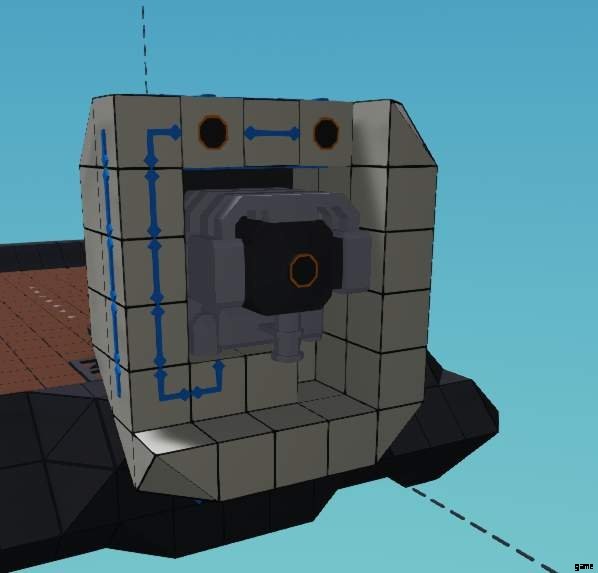
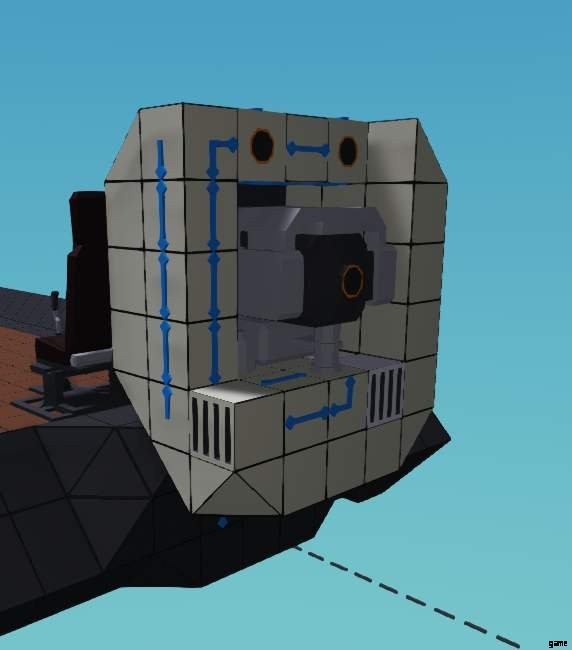
Wir werden das erste System entwerfen, das auf dem obersten Bild dieser Anleitung gezeigt wird, also baue ein Rohr mit T-Profil neben der Leistung deines Motors und baue einen Elektromotor darauf.
Hier ist es etwas eng.
Als nächstes bauen wir das Getriebe- und Kupplungssystem, das zum Generator hinter dem derzeit vorhandenen Getriebe führt (da wir so viele RPS wie möglich wollen).
Lassen Sie uns jetzt die Dinge verkabeln
Stellen Sie ein 1:3-Verhältnis auf den Generator und schließen Sie die Kupplung an einen Gashebel an, während Sie den Strom anschließen. Der Gashebel ist eine vorübergehende Maßnahme, damit wir eine gute Kupplungsübersetzung dafür herausfinden können, ohne ein automatisiertes System zu bauen (was besser, aber schwieriger zu führen ist!).
Sie möchten auch das Gas des Motors halbieren, damit wir nicht zu viel Energie verbrauchen. Teilen Sie also entweder den Gaseingang durch 2 oder multiplizieren Sie ihn mit 0,5, Ihre Entscheidung. Dies ist derselbe Gashebel, mit dem Sie den Motor steuern. Wenn Sie also w/s verwenden, verbinden Sie ihn damit.
Testergebnisse, Runde 2!
Also… die Batterie entlädt sich, selbst bei 100 % Generatorkupplung, warum ist das so?

Nun, wir fordern die Motoren in diesem Fall tatsächlich zu stark, also müssen wir die Karosserie ein wenig modifizieren. Entfernen Sie die Zwillingsstützen auf der Rückseite und installieren Sie eine einzelne zentrale an ihrer Stelle. Machen Sie jetzt einen Testlauf, ohne etwas anderes zu ändern.
Testergebnisse, drittes Mal ist der Reiz!
Wir haben den Motor ziemlich deutlich aufgeladen. Wir erreichen jetzt 12-13 RPS und können höhere Geschwindigkeiten erreichen, aber trotzdem scheinen wir nicht mehr Kraftstoff zu verbrauchen als zuvor. Der Batterieverbrauch ist immer noch ziemlich hoch, und wir müssen den Motor hochdrehen lassen, bevor wir die Generatorkupplung drosseln, damit das Ding anfängt zu erzeugen.
Wie kommen wir also auf eine Lösung, bei der wir nicht ständig manuell an der Kupplung herumschrauben müssen? Versuchen wir etwas Einfaches. Wir wissen, dass unser RPS-Spitzenwert bei etwa 12 liegt, also wollen wir einen Wert von etwa 0,75 Kupplung (ein guter Kompromiss, den man herausfinden kann, indem man verschiedene Werte testet und eine Weile herumfährt, während man sich den Batteriewert ansieht).
Es stellt sich heraus, dass 12 geteilt durch 16 0,75 ist, also können wir den RPS des Motors anschließen, um die Generatorkupplung zu steuern, solange wir den RPS durch 15 teilen Motorleistung. Wellen werfen das Boot herum und der RPS springt herum, also müssen wir etwas Spielraum haben, nur um sicherzustellen, dass die Batterie aufgeladen wird.
Ergebnisse!
Wir haben es geschafft, mit dem Doppelverbrennungsmotor die gleiche Leistung zu erzielen, obwohl die Einrichtung komplizierter ist, wir tatsächlich weniger Kraftstoff verbrauchen und eine Energieerzeugung vorhanden ist, wahrscheinlich genug, um sogar ein oder zwei Flutlicht dauerhaft zu betreiben.
Selbst wenn die RPS des Motors wahrscheinlich höher ist als wir wollen und wir einen noch geringeren Kraftstoffverbrauch haben könnten, war es unser Ziel, die Leistung des zuvor entworfenen zweimotorigen Motorboots zu erreichen
Dieses System kann auch auf das zweimotorige Setup angewendet werden, um es noch leistungsstärker zu machen.
Zusätzliche Anerkennung für die Bootsdesigns
Keine Zugehörigkeit zu dieser absolut schrecklichen Youtube-Serie.
Dieser Abschnitt geht darüber hinaus und zeigt einige Tricks (von denen einige über das Motordesign hinausgehen), die einige Arbeit erfordern, um die Boote noch besser zu machen.
Da die meisten Verbesserungen am zweimotorigen Fahrzeug vorgenommen werden können, werde ich mich mit diesem speziellen Fahrzeug befassen. Was das Beiboot mit elektrischem Antrieb betrifft, so besteht die einzige wirkliche Verbesserung, die daran vorgenommen werden kann, darin, die Generatormotoren zu verdoppeln und die Trennwand zu entfernen.
Es sind andere Anpassungen an diesem Fahrzeug möglich, wie das Einsetzen einer elektrischen Unterstützung oder das Trennen der Motorausgänge, sodass ein Motor eine Stütze antreibt, aber der Kürze halber werde ich nicht darauf eingehen.
Denken Sie daran, dass, obwohl all dies auf diesem Beispielboot durchgeführt wird, die hier verwendeten Methoden auf die meisten Bootstypen anwendbar sind, die Anzahl und Besonderheiten unterschiedlich sein werden, aber das Prinzip das gleiche bleibt.
Beratung
Wenn Sie es eine Weile nicht getan haben, geben Sie dem zweimotorigen Boot einen Testlauf, um zu sehen, wie es sich anfühlt, zu fahren, und bestimmen Sie, was möglicherweise verbessert werden könnte, nachdem Sie den von uns eingebauten Begrenzer entfernt haben, indem Sie das Getriebe auf 1:2 senken. Das ist die Grundlage dafür, das Fahrzeug zu verbessern, einfach darin herumzulaufen und darüber nachzudenken, was verbessert werden könnte.
- Es ist sehr schwierig, bei hoher Geschwindigkeit zu wenden, ohne das Boot zu überschlagen.
- Das Boot gleitet viel zu stark bei etwa 11–12 U/s.
Das sind 2 der sehr offensichtlichen Fehler, die jetzt die dringendsten sind. Konzentrieren wir uns darauf, sie zu beheben
Datum reparieren
Sie können sich vorstellen, dass dieser Abschnitt nur von Mr. Plinketts schöner Stimme stammt. Wenn Sie nicht wissen, wer Mr. Plinkett ist, halte ich Sie für unkultiviert, aber das ist vollkommen in Ordnung.
Stabilitätsverbesserungen
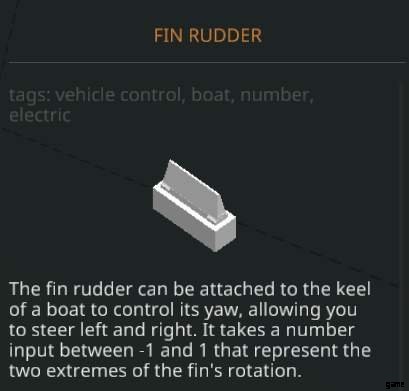
Lassen Sie mich Ihnen eines der magischsten Stücke in Stormworks vorstellen. Das Flossenruder ist, wenn es ins Wasser eingeführt wird, ein Widerstandsmonster, das Winkelbewegungen extrem stark widersteht, und mehr noch, um es auszunutzen, brauchen wir in den meisten Fällen nicht einmal Strom.
Alles, was Sie tun müssen, ist, sie wie gezeigt zu installieren, Sie müssen keinen Strom oder ähnliches anschließen, jetzt machen Sie eine Probefahrt. Was ist passiert?
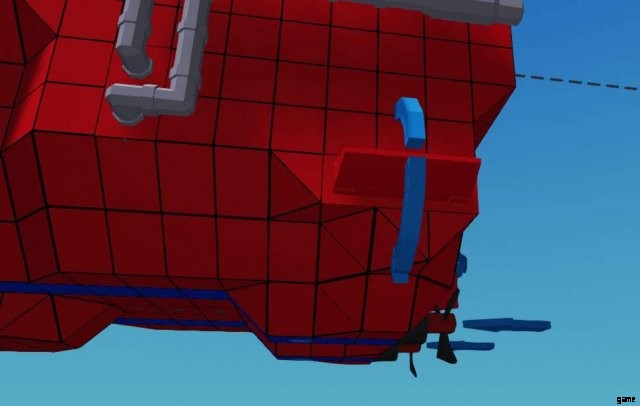

Oh, wir haben gerade die Geschwindigkeit verdoppelt. Also gut.
Verbesserte Kühlung
Während der Motor ohne Kühlungsverbesserungen bei etwa 105 Grad auf einem stabilen wellenlosen Ozean sitzt, beginnen die Probleme, wenn wir anfangen, Luft zu holen und der Motor über 15 U/s springt. Leider erhalten wir hier auch den größten Teil unserer Geschwindigkeitssteigerung, also haben wir ein Dilemma:
Lösung 1: Der einfache Ausweg:Begrenzen Sie die Motor-RPS auf 15 auf beiden Motoren. Bam, du bist fertig.
Lösung 2
Machen Sie eine ziemlich große Schaufel am Boden des Schnellboots. Es muss nicht 2 tief sein wie meines, aber dies stellt absolut sicher, dass es weiterhin bereitwillig Wasser aufsaugt. Dies erhöht natürlich auch den Luftwiderstand und wirkt sich auf die Geschwindigkeit aus, aber wir haben noch viel übrig.
Schließen Sie es dann an das Kühlrohr Ihres Motors an, platzieren Sie eine Pumpe, die den Flüssigkeitsfluss in eine Richtung zwingt und Druck in das Kühlsystem drückt. Ich habe diese Pumpe vorerst mit einem konstanten Ein-Signal gezwungen, aber es ist besser, sie später an einen Startschlüssel anzuschließen.
Then make a small (or 2, or 3) liquid tanks filled with water connected to the cooling pipe with T-pieces, these are reservoirs for the coolant, which is consumed very quickly for the 2 engines. They will be useful when we bounce around with waves, so the engine will never be left without cooling.
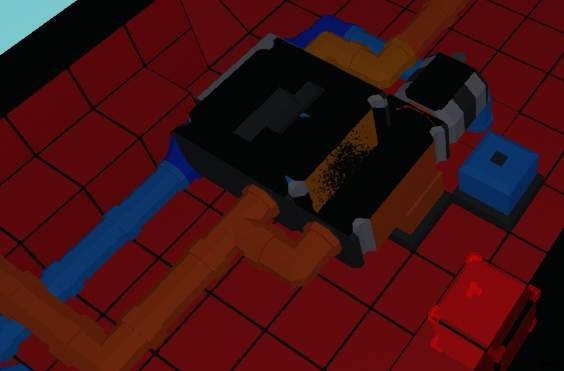
While not really an absolute need, now would be a good time to install an generator. Place it before the gearbox and place it behind a clutch permanently stuck to 0.5 or so. This means it’s taking only a little bit of our engine power and keeping our batteries charged. Unfortunately the picture is somewhat unclear, as cutting the boat in half cuts out the top of the components.

That should keep it in check. The engine heat doesn’t really go high above 30C° now.
Forcing planing
We use the very same magical part from the first section, the rudder.
We’ll be placing it somewhere along the bottom, depending how much we want to plane. I’ll put it right around here, though adjusting its position later for further testing is a good idea. Then attach a throttle lever to it, and set the throttle’s range between 0.1 and -0.1. Don’t forget to give it some electrical juice.
Now, what we will be doing is taking it for a ride, we’re looking for a value to permanently bind to it where we plane, but we don’t become unstable. It is also possible to make this reactive, so it only activates at speed with a microcontroller, but given with how many images and deep explanations i need to give with microcontrollers, i’ll pass on that, sorry!
Planing without being a plane
For me, the value for stable, non-planing is with about 90% throttle and 0.1 (note that the rudder will be pushing the nose down with this value because of how it’s aligned in the picture), and 0.05 will allow it to plane while keeping it steady.

Around 80 knots for a speedboat isn’t too bad, is it?
Exploding less dinosaurs
Ah yes, fuel economy. This one’s easy after all those.
- Return the gearbox to 9:5
- Find a value for the front fin rudder where it provides lift so you can plane, for me it was -0.1
Exploding more dinosaurs!
That’s infeasible, but if you really want it to give all of its performance, move the RPS cap of the engines to 28 or so. It will be very very unstable without any electronic stabilization, and it would take a section of about the size of this whole section to explain. I can only wish you good luck, you absolute madman.
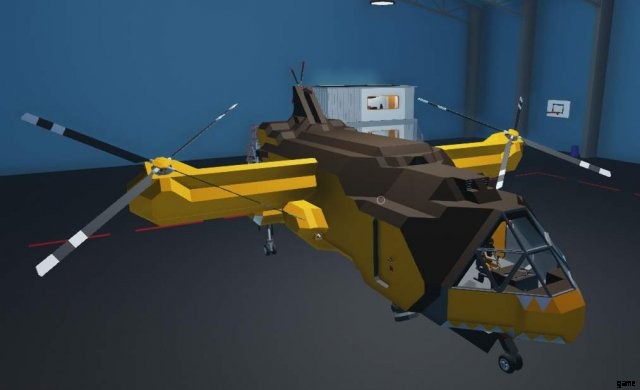
Designing an All-Around Helicopter for Medical &Rescue
Well, it’s finally here (this statement will age well after i’ve put in all the other sections, won’t it?) the helicopter.
- Here’s a war crime for you to use.
Nicht wirklich. I’m not kidding, apparently using the red cross without proper authorization is a violation of the Geneva convention, which makes it a war crime! You learn new and interesting things every day.
No, i didn’t opt to remove it, because i’m an Egyptian sun god. (Unless i’ve changed my Steam name at the point that you read this, then just imagine whatever is appropriate)
Jests aside, this is, without any jokes, the hull of the first helicopter (well, second revision of it) that i ever made in the game. I’ve stripped off pretty much everything out of it, so you only have the hull to work with. I’ve even removed all the connections, because i’m a terrible person! Some just want to watch the world learn…
But… what’s a helicopter?
You know those things called airplanes? They’re called “Fixed wing aircraft”, do you know why? It’s because their wings don’t flap, move, turn, or anything like that. They depend on something pushing them so that the air moves over the wings which are designed to generate lift which makes it so that when the plane moves fast enough, it’s pulled off the ground. Amazing, huh?
Helicopters are rotary wing aircraft. They’re called that because some complete genius decided that instead of having wings like planes… what if… you put those 2 wings on top of the plane, and instead of something like a prop engine pushing the plane, what if we just spun the wings around? I’m sure that ended in some sort of a massive explosion and fireball, but somehow we ended up with the helicopter as a result.
“But i didn’t ask that, you’re just putting words in my mouth!”
Oh by the way there’s going to be an unusually large amount of theory in this section, because understanding how helicopters, and their props work is the key to making a good one. Thankfully the previous section takes care of a lot, so let’s actually do something concrete.
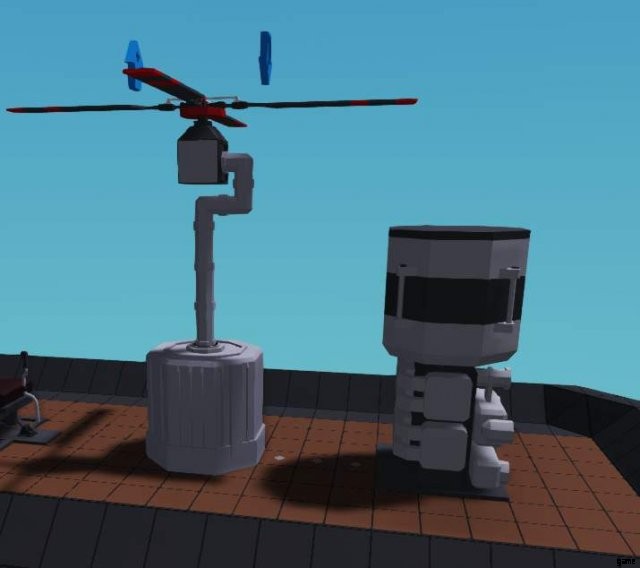
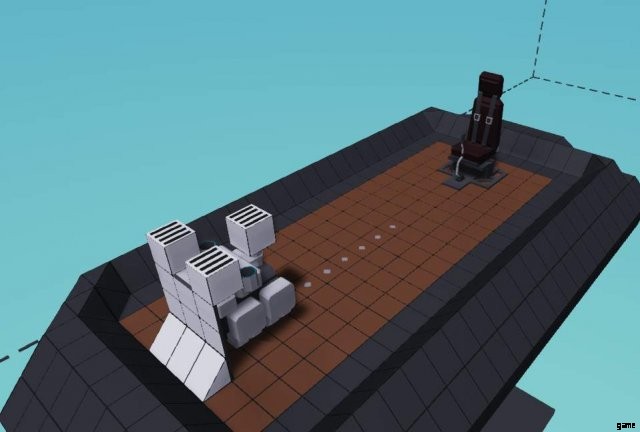
Let’s build stuff before you get bored of the wall of text

Make this extremely crude addition to the helicopter, the components in question are a throttle lever and a tail rotor
“But that’s not a propeller, and that’s not where a tail rotor goes!”
Shush, don’t make fun of the tail rotor’s size or where it’s situated. It’s a perfectly capable helicopter rotor in its own right. Plus it’s easier to fit on there. Link up the tail rotor’s Yaw to the throttle lever, and wire up some electricity for the throttle lever. Change the throttle lever’s properties so the range is -1 to 1.
Now just go ahead and play with the throttle for a while. You see what the rotor’s blades are doing? This is something that’s called the collective. Also super secret amazing hidden feature:click E or Q on the tail rotor to fold it. Magic.
Nobody expects the Spanish theory section… especially when it’s written in English
“But i thought that was the theory section…”
Yes, sorry, it wasn’t, but i promise this part is actually shorter than you think.
Collective is nothing but the attack angle or prop pitch, but for helicopter rotors. It’s actually simpler than apparent:The higher the collective, the more lift the prop provides. This also means that it has more drag, so the engine has to give out more torque to rotate it.
The reason i’ve asked you to also hook in negative, is because negative collective (in case of tail rotor, helpfully labelled yaw) is also a thing. This allows you to turn left and right with the tail rotor, or make an upside down propeller provide upward lift.
If you’re unfamiliar with the “six degrees of motion” terminology, here’s the simple explanation:
- Yaw:Turn Left or right
- Pitch:Tilt up and down
- Roll:Tilt left or right
“Can we stop with the theory now?”
No, because i’m ending this section. Ha-ha, the building part you were looking forward to was in the next section all along! Now you know how Mario feels when he finds Toad instead of Princess!
Also delete that tailrotor and throttle from the side of the helicopter, we won’t be needing them.
Designing an All-Around Helicopter for Medical &Rescue pt 2…ish, But Not Really
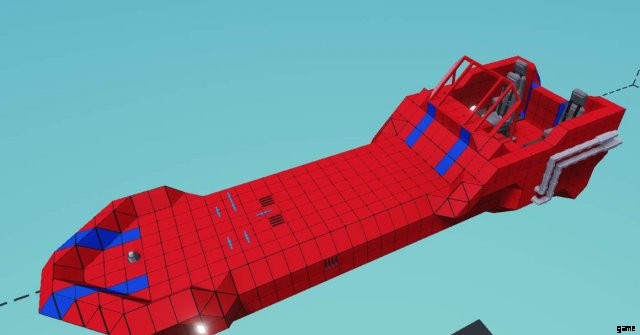
First things first, let’s examine the helicopter. The particular importance, like with the speedboat is the center of mass.
“Wait, is this another theory section? I thought you said…”
Super quick, super important, ok? No funny stuff, i’ll just get it out of the way, deal?
As this highly professional MS paint shows, because this is a pulling, instead of a pushing type of motor (unlike the speedboat for instance) the force on the imagined “lever” is a more rotational type force that forces the nose to pitch down. Imagine like you were dragging it around on a string. This is what the force is like.
Misaligned center of mass also causes a significant amount of instability, so it should be of utmost importance to try and align these as much as possible for any helicopter. The batteries are situated where they are to try and adjust this balance.
It should also be of note that when fuel drains, it can easily shift this center of balance, so fuel tanks should be situated in line with center of balance.
Now let’s actually get to building
Since this is a general purpose helicopter, and comes with a winch, a single diesel engine lacks power to carry stuff, but would be OK for ambulance only. If you only care about range, want to make it lighter and a medical rescue helo, you can follow this guide by building a central single engine instead.
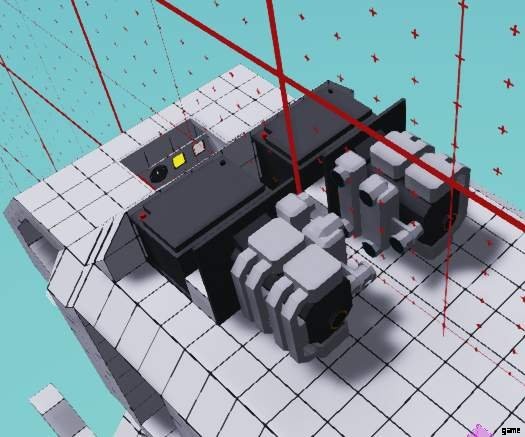
My personal preference is to make the twin engines in designs like this “kiss” eachother. One tile gap between them allows extremely compact engine designs without compromising utility. As before, this isn’t really a pipe beauty guide or anything like that, so i’ll walk you through the less obvious ones:
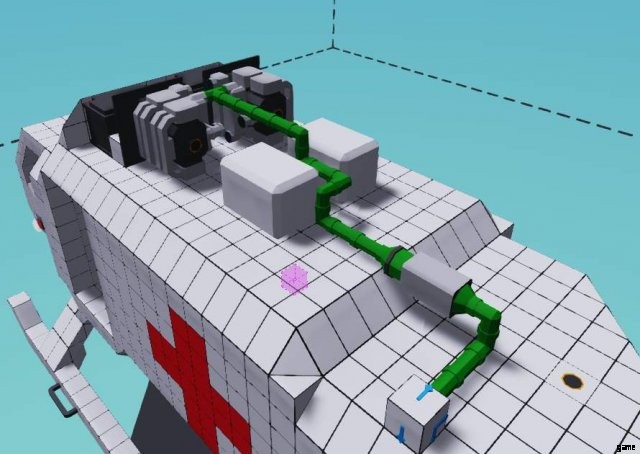
The fuel pipe has a fluid intake situated on the back-end of the craft. A rear-mounted single pump is useful to have for pushing the fuel all the way to the tanks. It might not be a necessity, but it really isn’t a problem on electricity drain either way.
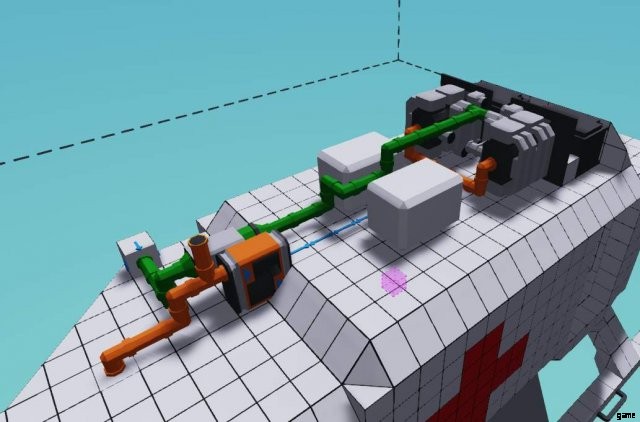
Hook up the drivetrain to the already existing tail and introduce a gearbox along the way, where and how is up to you. The tail exists already for your convenience, and has a sneaky little generator behind a clutch so we can keep electricity topped up.
How you design the rest of the engine bay, including cooling and air intakes is up to you. This will not use a lot of cooling, the double radiators i used are mostly for aesthetics (and possible future tuning). What’s important is that you have all that you need hooked up.
Now would be a good time to hook up that engine by locking its throttle to 1 with a constant number and giving it a go. It’s easy at this point to see the engines still so you can tell what issues (if any) they have. Though you could also just remove a part of the interior ceiling to see them, i guess.
My engines stabilize at around 93 and 91 degrees. There’s often some weird variance between 2 sides, up to even 10 degrees. Don’t let it bother you.
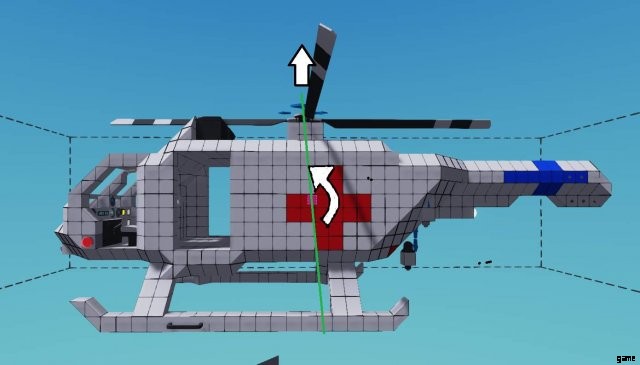
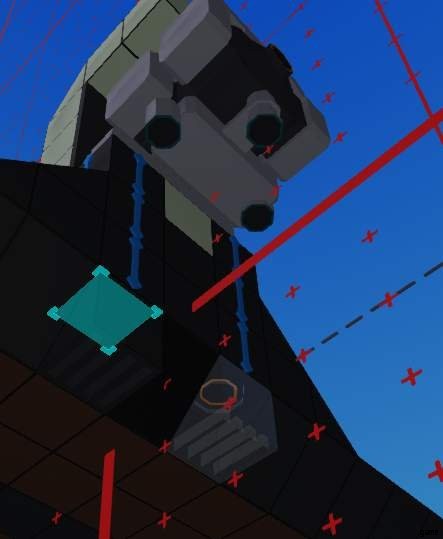
The crown on top of the helicopter
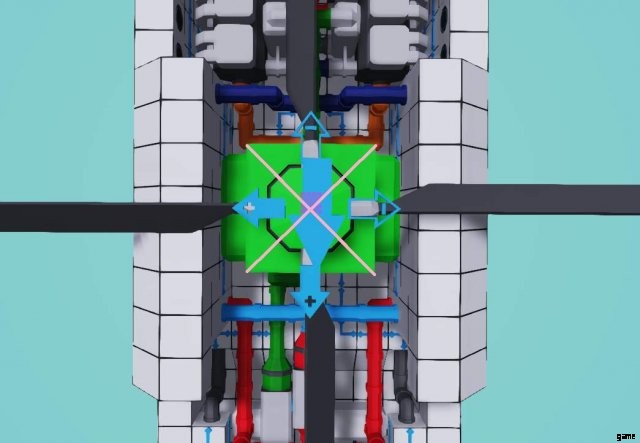
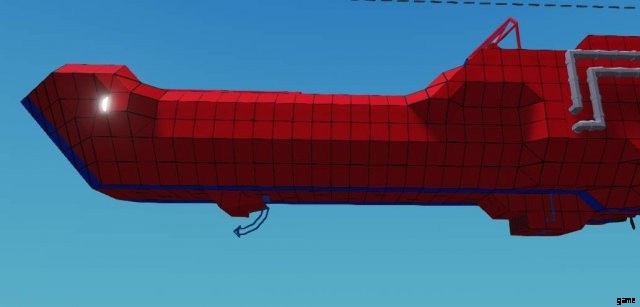
Finally, it’s time to put the cream of the crop on the top. Make very sure the large rotor is as close to in line with with the center of mass as possible.
In the picture of mine you can see i drew a pink X on top of the rotor housing. You should notice 2 particular things:
- The large arrow is nowhere near centered and is a poor indicator for it being near the center.
- My arrow is pointing backwards.
The latter just means i will have to inverse my inputs with a multiplication of -1. This is the only time in the guide i will refer to this, as it’s very possible with your engine design you can simply place your rotor the right way round.
Hook up the rotor to the drivetrain behind the gearbox, then do the last bit of covering up of the engine and beauty work, because the engine is going away now. We won’t be seeing it again unless we need to work on it again in the future. Finally, sneak a tail rotor in place, there’s a pipe eagerly waiting there. You can install rudders if you’d like to have them.
This is a good time to test those engines again.

Sure, it looks like a dopey humpback, but it’s done from a mechanical standpoint… but why doesn’t it fly even with the prop at positive (locks collective to 1)?
A sneaky anecdote
So, there’s 2 different types of helicopter:
- Old style: The prop is completely locked on positive, and engine throttle determines how much lift is gained.
- Modern: The collective is variable and determines the lift, and electronics control the throttle to keep it at a desired RPS.
There’s up and downs to both of these systems, the old style is more reliable, as there’s less moving parts, but the modern is significantly more flexible and responsive to input as it doesn’t rely on throttling a combustion engine.
Wiring it up
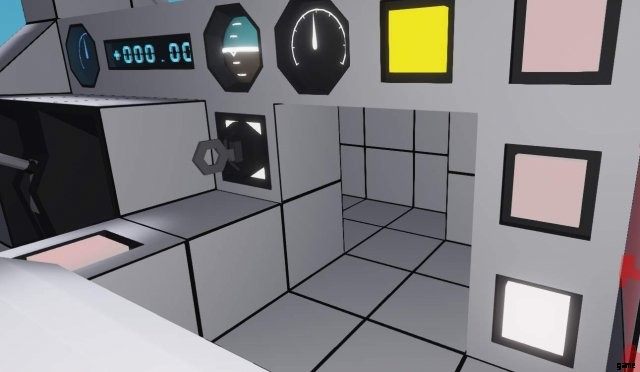
You will find a lot of the cockpit pre-wired (and mysterious nonfunctional controls for other stuff that aren’t there, hmm), the main part we’re interested in is the gyro already installed at the back of the seating compartment.
As doing an electronically controlled engine requires significant electronics, i will leave that for extra credit, along with a few other things. We will be making an old style one.
First, install a throttle lever to control the engine throttle, then wire up these inputs on the gyro:Roll, yaw and pitch, leave the up/down alone. Oh, and something to start the engine would be nice. Finally slap the gear ratio of the gearbox to 1:2.
After doing all that, wire the stabilized output of the gyro to the relevant outputs. The yaw goes to tailrotor, pitch and roll go to the rotor above. You know that part which i said i won’t bring up? Ich habe gelogen. This is just a friendly reminder that if your rotor is backwards, your stabilized(!) pitch and roll are reversed. Likely your stabilized yaw is also reversed with how the tail rotor is faced.
You may play with stuff like the ratio later on your own, the reason i’m not going into more detail and explaining the choices better here is because i’m running close to the size limit of this section of the guide. I will save more of the detailed explanation for the extra credit part.
Test run? Test run!
Quick troubleshoot:
- Does it just roll like a washing machine tumbler?
- Invert the stabilized roll going to the rotor
- Does the engine blow up?
- Limit the RPS lower than 20
- Does it stutter weirdly at high throttle?
- This is engine tremble, because the engines are peaking out with their RPS and responding to the changing load while they’re spooling up their own rotations. It’s an unavoidable part of using this old style hookup. You can get rid of most of the engine tremble corrected by the gyro by dividing the stabilized roll input by a relatively large number, like 5, but this is fixing the problem and not the cause.
Those are the only problems that are really possible for this setup…
Finally, test at what point it lifts off. For me it’s 0.55. It might be wise to set the minimum throttle slightly below this for a good landing setting, something like 0.53 worked for me. It is an absolute power house, but with the rather difficult throttle control it’s really not easy to handle, but it most definitely flies, and it flies hard.
In other words, a perfectly functional helicopter, good job!

Extra Credit:Engoodening the All-Purpose Helo
If Internet Historian says “Engoodening” is a word, it sure is a word!
The entire section is practically dedicated to making an electronic engine control module, and it’ll be quite light in theory, but if you can’t think with logic gates, it’ll be quite complex. Let’s get the theory out of the way:
The theory section
We want the small engines to hover around a desired RPS, and we need the throttle to be automatically controlled to do this. There’s 2 ways of doing this:
A physical throttle lever that is controlled by the electronics
- This gives us an easy to see visual representation of what the script is doing.
- In emergency situations we can have an override that disables the script from controlling the throttle.
- It’s easy to disable the automatic throttle control and turn the throttle to 0 to shut off the engine.
An internal throttle control that’s handled inside the microcontroller itself
- This is significantly more responsive than the actual throttle lever even with high throttle sensitivity.
- Requires less size as a microcontroller as it doesn’t need the 2 outputs to the throttle lever.
- Requires less space in the cockpit.
Usually i would favor the bottom one, but it does require more work to tune the sensitivity of the counter, and is generally a bit more difficult to design. We’ll go with the simpler, if still more striking option.
First things first
If you’ve followed the guide so far and are not here to look up upgrades for your helicopter, we only have a throttle control, without the up/down of the gyro being engaged. The up/down control from the gyro will control the collective of the helicopter blades to provide lift. At 0 engagement it will make the helicopter “neutrally buoyant”, or close enough. In reality this won’t be quite exact, as every helicopter and situation is a little bit different.
Here’s what we’ll do:
You can either hook up another throttle lever for the up/down adjustment in the cockpit, or simply wire it to up/down on the seat. For the throttle lever you’ll need -0.4 as the minimum for a good landing setting.
After hooking up the lever to the gyro, hook up the stabilized up/down to the collective of the helicopter blades, then make very sure to set the prop of the heli to neutral. This will allow adjusting the collective of the prop itself.
Return your throttle’s minimum setting to 0, then connect its electrics to an electric relay so that it can only get juice when the relay is on. If you haven’t used one before, it’s an electric switchbox that’s controlled by an on/off signal. We will use this to disable the manual use of the throttle lever when the override is on.
The relay isn’t absolutely necessary, and you can have a 2×2 microcontroller instead without it, but adding it won’t be much trouble.
Let’s get to the electronics, with some pictures!
Let’s dig a nice hole for that microcontroller, the 2×3 space hidden behind the panel should be enough. You need to dig in there a little bit, but it’s fine.
Let’s design the microcontroller now, we’ll need the following:
- Override input (on/off).
- RPS Input (number)> one is enough, the engines are stuck on the same drivetrain.
- Throttle up output (on/off).
- Throttle down output (on/off).
- Relay output (on/off).
We’re going to use a similar layout to this. Let’s lay out our already existing pieces in a sensible manner.
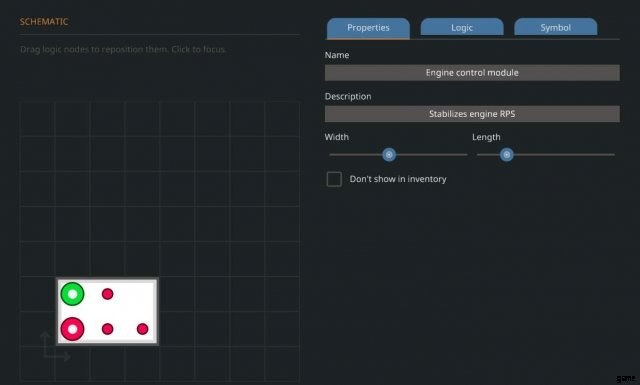
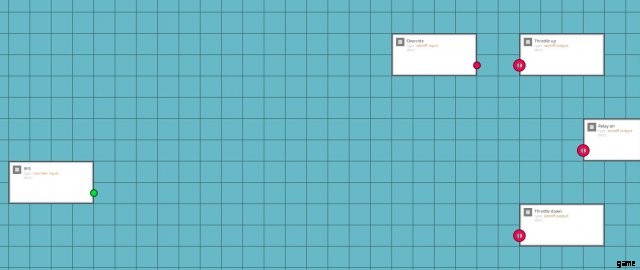
Nett. The far left will feature RPS only, because we’ll need some logic to handle it, the right hand side will feature our assortments of other stuff. We will be using the override later, so it’s off to the side.
Chips we need:
- Less than> Hopefully obvious.
- Greater than> As above.
- Property number> Easily modifiable number that you can adjust in properties.
- Add>
- Substract> These 2 modify the property number.
- 2x Constant number> Set at 0.5 so we have a desired range.
Lay them out as such
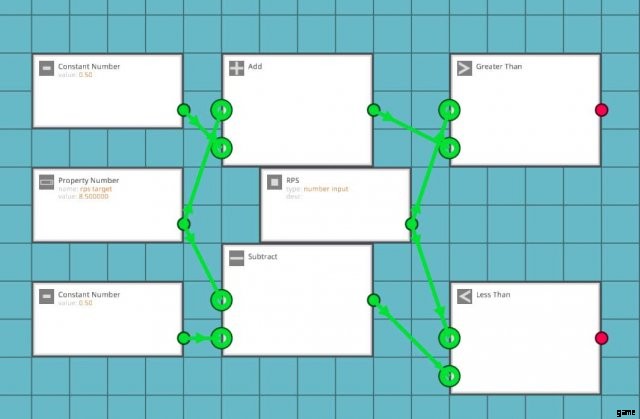
I will try to explain the logic behind these in the first paragraph after every picture, if you’re already decent with logic, you can skip this part. Firstly, we’re using 2 constant numbers only so it’s easier to read. The incoming number sets the desired target, the addition and substraction creates a range of +0.5 and -0.5 from that value, this compares the RPS coming from the engine to see whether or not it is larger or smaller than the desired value.
We can also make it so that the desired value can be determined by things like keypad input, but that’s for you to do if you wish to do that. Now that we have the comparative logic in place, let’s handle the outputs logically
Chips we need:
- Or> So that either greater or lesser than input enables the relay so that the script can modify the throttle.
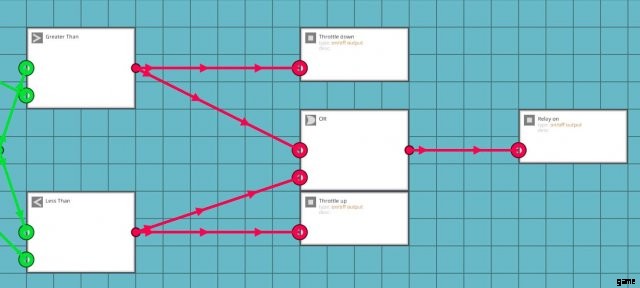
Well, that was simpler than expected, wasn’t it? This setup enables the relay whenever either greater than or lesser than condition is met, and allows the adjustment of the throttle. However, it disables the relay when either condition isn’t met (the throttle is in desired range), and thus disables you handling the throttle lever.
Ok, it’ll take a little bit of thinking to do the override properly. Our easiest way is probably to attack the numerical section of the electronics, as explaining how to override the binary logic itself would be a little bit more complicated.
Chips we need:
- 2x Numerical switchbox> We switch out the RPS input for a desired value.
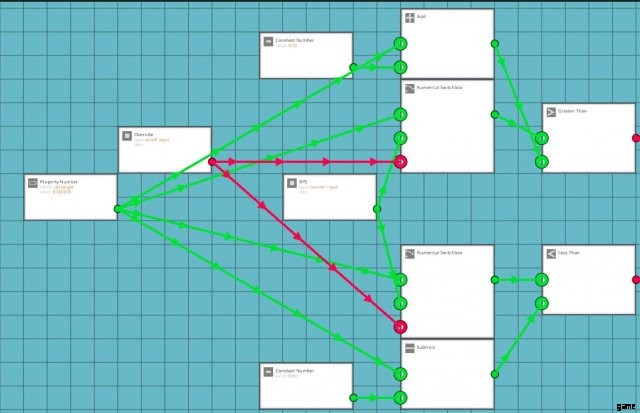
It might be a little hard to read, but the RPS values are on the “off” state inputs of the switchbox (when override is not on), and the desired number is on the “on” state of the switchbox inputs, which are linked to the lesser and greater than A ports. This means that when override is on, the electronics think that the engine RPS value is always at a desired state.
We’re still missing one little thing, forcing the override to enable the relay
Chips we need:
- 2x Not gates> Optional, i use these in pairs (they cancel eachother out) to route the signal. Makes it easier to read.
- Or> For yet another fork to the relay input.
This makes another OR-fork for enabling the relay. As you can see, the paired NOT gates makes a nice routing for the signal, instead of it just crossing over everything.
I’m sure you can figure out where and how to wire these, but just in case there’s someone who’s still very much learning english, or simply having a confused day (and doesn’t want to ask the silly question) here’s the breakdown:
- RPS takes in the RPS value of any engine.
- Override takes in a toggle button.
- Throttle up goes in to the up input of the throttle lever.
- Throttle down goes into the down input of the throttle lever.
- Relay connects to the electric relay that is connected to the throttle lever.
If you’re flying the helo made with the section above, set the desired value to 11, then set the gearbox to 1:3.
Testing time
So… it kinda works. If you gun the collective, but you soon have to hit the override and handle it yourself. What’s wrong?
What’s happening is that the script is failing to take into account that the engine is taking time to respond to the throttle input. It’s trying to adjust the throttle wanting an immediate reaction from the engine. This would work with an electric motor, but we need to look at something else.
Let’s go back to the script for one more final swing at it.
Note:This section ran out of text space, how awkward.
Extra Credit:Engoodening the All-Purpose Helo (Cont.)
One more tweak, that’ll surely do it!
Chips we need:
- Delta> High school maths. The difference of a value given a unit of time (in this case, 1/60 of a second).
- Greater than>
- Less than> These 2 for comparisons.
- 2x Constant value> To be compared against.
- 2X and> The RPS value is below and not rising or The RPS value is above and not dropping.
- 2X not> Read above.
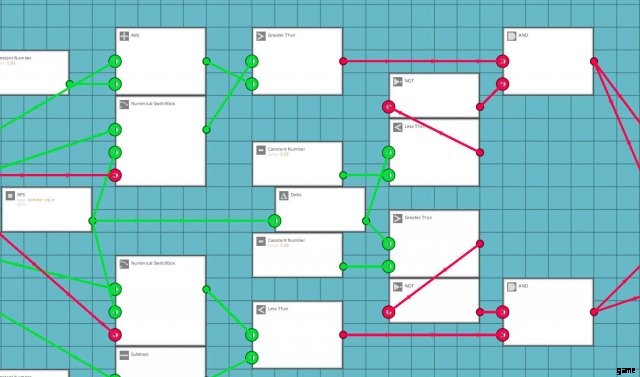
It’s easier to describe the logic here as the computer reads it. Remember, delta looks at the difference of the RPS value, so we will know if the engine is spooling down or up.
Here’s essentially what the entire chip does:
- If RPS is less than desired value and not already rising:Enable relay, increase throttle.
- If RPS is more than desired value and not already dropping:Enable relay, reduce throttle.
- If override is on, RPS =Desired value:Enable relay.
The 0 setting for the constant numbers is not error-free. Something like 0.01 or 0.005 would likely work better. You’d have to observe the delta number to figure out what’s a good value for it. Calibrating this value is pretty engine setup specific, but it won’t take too much trial and error to figure out. All it takes is making a temporary number output and getting the readout on the delta value on something so you can watch the decimals work.
Let’s test again, like we did last summer
Hey! If you wired up everything correctly, it’s perfectly functional now. It responds relatively fast, and stabilizes the engine by throwing the throttle around.
The only problem with this is that it does so little bit too eagerly, this is mostly a very mild annoyance type of problem, as it revs the engine up and down to keep within the target. The only way to deal with this particular problem is to make another logic section that handles the fine adjustments of the throttle lever itself. Basically this is what you need to have:
- If RPS is within +/0.3 of desired value:Do very short touches on throttle to find the sweetspot.
- Something more reactive likely works best, like:
- If RPS is less than 0.3 more than desired value and delta is above 0, reduce throttle for X amount of ticks
- If RPS is more than -0.3 less than desired value and delta is below 0, increase throttle for X amount of ticks.
This i will leave for you to figure out how to do, but i’ll say it isn’t very difficult to do. I’ll give you a hint:The timer logic blocks allow you to configure them to output things for X amount of ticks, you can multiply the absolute (removes negative) delta value to get an exact adjustment for desired throttle, but it’ll need some trial and error. You probably want the timer that outputs when it is less than its set duration. If you want one-tick adjustments and can’t figure out how to deal with the clocks, a combination of toggle to push and blinker allow you to put out 5 or 10 signals per second as opposed to 60. Or, you know, you could just use a PID, but where’s the fun in that?
Success!
Extra Badly Designing a Combustion Engine for Boats
This section is mostly meant for what it looks when you design a section of a guide without testing the concept firsthand. I left it in as a curiousity more than anything else, please do not follow this for your sanity’s sake.
Let’s start building. My outboard will be slightly creamy with red racing stripes.
The engine should be seated so that the coolant in/out piping is either in line, or one behind the last block on the Dinghy. Yes, it will be comically huge because we’re using the “small” diesel engine, but this is fine.
This is an easy way of dealing with cooling. If you want a rotary version of the outboard, you’d have to integrate the cooling into the downward reaching part of the outboard with the prop, but it’s relatively easy to pipe.
When dealing with exhaust and fuel, we should bulge out the outboard’s cowling (the shell of it) so we can hide encased piping where we want it. This was my design of choice, but you can just pipe it out the side as well.
This is my solution for the air intake. Unsurprisingly, the most important feature of the air intake is to take in air, but at the time of writing the engines don’t care if water gets in it even for a good while, you don’t need to make a filtration system.
For the tank i would use a custom enclosed tank, but since this is attached to a dinghy and the weight would be absurd, i’m in fact going back on that design and just tucking on a small tank, as it’s enough for testing, and for later use the outboard can be taken off and used as a subassembly!
Finally, we should hide a gearbox in the bulky form of the comically huge outboard engine.
Make sure that the gearbox’s arrows are pointing toward the engine, since we want to increase the RPM.

Then finish the rest of the cowling and make sure the damn thing floats.
Testing time!
Now as said before, we’re working technically against a constant load. So wire that sucker up in any way you like, try for 2 gear ratios that sound feasible to you (like 2:3 and 1:2) and prepare to test it out.
Here’s the dials (or other readouts) that we want:
- Engine heat (optional, but good to see).
- Engine RPS (absolute must for fuel economy tuning).
- A visible way to see whether or not the gearbox is toggled on.
- Fuel tank’s contents.
- Speed.
What we’re looking for
Signs of the gearing being too low:
- RPS increasing above 8 on a small engine (unless you don’t care about fuel efficiency, then 10-12 RPS is a good target).
- The boat becoming unstable (this can be addressed with hull design).
- Excessive fuel consumption.
Signs of the gearing being too high:
- Excessively slow start (slow start is ok, since we have 2 gears to play with we can use the other one too).
- RPS stays constantly below 6 even after reaching full speed.
- It doesn’t start at all (very hard to do in a boat).
After flipping my boat a few times with the excessively heavy outboard, i’ve come to a value of 5:9 for the gearbox being perfect. RPS sits around 7.2 and rises up to 9 if i catch some air, but never enough to flip the boat if i feather the throttle a little bit. It can reach about 10m/s before becoming unstable.
So what have we learned (possibly):
- Heavy outboards on small rubber dinghies are dumb and cause it to flip.
- If there was more weight toward the front of the craft, we could go faster without flipping.
- Getting that right gear ratio for a boat requires a few test runs, so it probably should be done last.