
Dies ist ein Leitfaden, der Ihnen ein grundlegendes Verständnis dafür vermittelt, wie Autotuning in der Hauptmontage funktioniert. Da dieser Artikel nicht so wissenschaftlich ist, scheint dieser Leitfaden überall verstreut zu sein, also seien Sie bitte verständlich.
Leitfaden für Autotuning
Teil 1:Identifizieren Sie den Zweck des Autos
Wie im wirklichen Leben haben alle Autos in Main Assembly einen bestimmten Zweck. Dieser Zweck würde das Tuning eines Autos stark beeinflussen. Das Tuning eines Rennwagens unterscheidet sich von dem einer Luxuslimousine, einfach weil sie einen anderen Zweck haben. Daher muss vor dem Tuning eines Fahrzeugs der Zweck des Fahrzeugs klar identifiziert werden, um eine angestrebte Fahrdynamik zu ermitteln. Soll es Unter- oder Übersteuern sein? Soll es sich steif oder weich anfühlen? Soll es schnell oder langsam sein? Wie viel Quer-G soll das Auto ziehen? Wie empfindlich ist die Bremse des Autos? All diese Fragen bedeuten, dass es keine richtige Antwort darauf gibt, wie ein Auto abgestimmt werden sollte. Und es ist unmöglich, es allen recht zu machen, da die Menschen den Zweck des Autos unterschiedlich verstehen können.
Wozu also diese Anleitung? Dieser Leitfaden soll den Spielern helfen zu verstehen, wie die Autophysik der Hauptbaugruppe funktioniert und was jeder Parameter mit einem Fahrzeug machen würde. Aber am Ende entscheidet der Einsatzzweck über die Fahrdynamik eines Autos und nicht jedes Auto sollte gleich fahren.
Teil 2:Motoren und Räder
Aufgrund einiger seltsamer Designentscheidungen erhalten die Räder mehr Grip und laufen ruhiger, wenn die Räder direkt an dem Motorteil befestigt sind, das Federung, Lenkung und Leistung kombiniert. Daher wird für einen Rennwagenbau eine kundenspezifische Aufhängung, die Motorteile verwendet, aufgrund des mangelnden Grips nicht empfohlen. Für ein großes Offroad-Auto kann jedoch eine kundenspezifische Federung vorzuziehen sein, da sie viel mehr Federweg gewährt. Darüber hinaus wird empfohlen, den Motorteil zum Antreiben der Räder zu verwenden, um die Fahrt noch ruhiger zu machen.
Vor der Auswahl des Motors sollten zuerst die Räder ausgewählt werden, da dies den Maßstab Ihres Autos bestimmen würde. Je größer das Rad, desto schwerer ist es. Umso schwieriger ist es zu beschleunigen. Gleichzeitig geht es besser mit Unebenheiten um. Aufgrund der langsameren Rotationsgeschwindigkeit ist es stabiler zu simulieren. Meiner Meinung nach sind die mittleren Räder die beste Laufradgröße, da sie das Beste aus beiden Welten haben. Aber manchmal sind kleine Räder aufgrund ihrer schieren Geschwindigkeit vorzuziehen. Große Räder werden aufgrund ihres Gewichts und der Schwierigkeit, sie zu beschleunigen, selten verwendet.
Die Auswahl des Radtyps ist sehr intuitiv, da sie vom Zweck des Autos abhängt. Ich würde daher auf dieses einfache Thema nicht näher eingehen.
Bei der Wahl des Motorstils sind der normale Motor und der Kompaktmotor physisch identisch, und daher ist der Kompaktmotor aufgrund seines cooleren Aussehens und seines kleineren Profils normalerweise die Standardwahl. Bei der Wahl der Motorgröße sind große Motoren normalerweise die Standardwahl für verschiedene Vorteile, es sei denn, die Größe des Autos erfordert einen kleinen Motor. Der erste Vorteil der Verwendung eines großen Motors ist offensichtlich die Leistung. Der zweite Vorteil der Verwendung eines großen Motors sind starke Bremsen. Der dritte und meist vernachlässigte Vorteil ist der große Federweg. Bei großen Federwegen kann eine weichere Federungsabstimmung verwendet werden, die den mechanischen Grip des Autos verbessern würde. Darüber hinaus wäre ein Trick, der das Handling von Aerogrip-schweren Autos verbessern kann, praktikabler. Dieser Trick wird in späteren Abschnitten behandelt.
Teil 3:Einfaches Programmier-Tuning
Nach der Auswahl der Radgröße und des Motors muss das Auto vor dem Tuning aufgrund einer möglichen Änderung der Gewichtsverteilung vollständig aufgebaut werden. Der Motor muss für eine spätere Abstimmung in der Mitte einer rechteckigen Platte platziert werden. Auch ein Tacho sollte verbaut werden, um den Abstimmungsprozess zu vereinfachen. Wenn das Auto gebaut ist, starten Sie das Tuning, indem Sie das Programmierpanel öffnen.
Motortuning
Das Allererste, was das Tuning sofort erheblich erleichtern kann, ist die Trennung der Programmierknoten von Frontmotor und Heckmotor. Dadurch können Vorderrad und Hinterrad unterschiedliche Einstellungen haben, was sehr wichtig ist, um einige Probleme in der Fahrdynamik anzugehen. Nachdem Sie auf den Programmierknoten geklickt haben, ist dies das Menü, das das Spiel bereitstellt, um die Leistung des Motorteils zu optimieren.
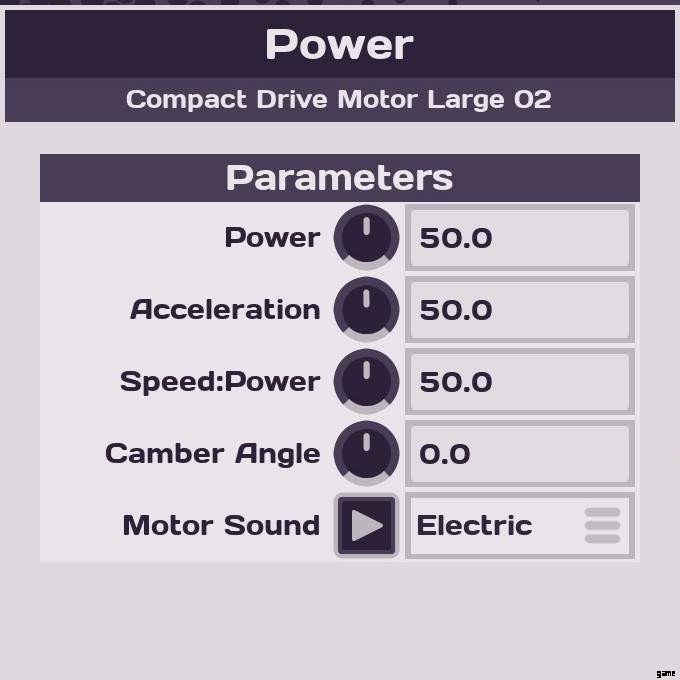
Leistung und Beschleunigung sind selbsterklärend. Ein wichtiger Hinweis zur Beschleunigung ist, dass es sehr schwierig ist, den Reifen in der Hauptmontage durchzudrehen, daher garantiert das Einstellen von Beschleunigung und Leistung auf 100 kein unkontrollierbares Auto. Wenn ein Auto jedoch einen sehr kurzen Radstand und eine schreckliche Gewichtsverteilung hat, kann Wheelie eine Gefahr darstellen, die überwacht werden muss, indem die Beschleunigung des Motors begrenzt wird.
Das Verhältnis von Geschwindigkeit zu Leistung ist normalerweise das, womit die meisten neuen Spieler Probleme haben. Wie vom Entwickler erklärt, gewährt eine Verringerung dieser Zahl eine höhere Höchstgeschwindigkeit, aber ein geringeres Drehmoment, eine Erhöhung dieser Zahl ergibt ein höheres Drehmoment, aber eine niedrigere Höchstgeschwindigkeit. Jeder Build hat aufgrund des unterschiedlichen Designs seinen eigenen besten Verhältniswert, aber jede Laufradgröße und Motorkombination hat einen universellen Startwert für das Tuning. Aufgrund meiner mangelnden Erfahrung mit kleineren Motorgrößen würde ich nur Wert für große Motoren geben. Bei großem Motor und kleinem Rad sollte der Startwert bei etwa 15 liegen. Bei großem Motor und mittlerem Rad sollte der Startwert bei etwa 30 liegen. Bei großem Motor und großem Rad sollte der Startwert bei etwa 40 liegen.
Wie im vorherigen Absatz erwähnt, sind diese empfohlenen Werte nur der Ausgangspunkt. Um den gewünschten Geschwindigkeits-/Leistungsverhältniswert zu erhalten, besteht der erste Schritt darin, den erweiterten Modus der Programmierseite einzuschalten und einen Debug-Knoten mit dem Tachometer zu verbinden. Da die Geschwindigkeit des Tachos in m/s ausgegeben wird, setzen Sie den Multiplikator im Debug-Knoten auf 3,6 für km/h oder 2,2369 für mph. Es wird auch dringend empfohlen, die Einheiten einzulegen, um Verwechslungen zu vermeiden. Führen Sie dann einige Höchstgeschwindigkeitsfahrten auf dem Flachland durch, um das Geschwindigkeits-/Leistungsverhältnis auf den gewünschten Wert abzustimmen.
Wenn die Geschwindigkeit des Autos zunimmt, kann das Untersteuern der Leistung stark werden (Untersteuern bedeutet, dass das Auto nicht dreht). Eine einfache Abhilfe besteht darin, nur das Drehzahl-Leistungs-Verhältnis des Frontmotors zu verringern. Dadurch wird das Drehmoment des Frontmotors verringert und das Vorderrad hat einen festeren Halt. Genauso wie das Tuning von Speed:Power Ratio würde ich auch nur bei großen Motoren Wert legen. Bei großem Motor und kleinem Rad sollte der Startwert bei etwa 3 liegen. Bei großem Motor und mittlerem Rad sollte der Startwert bei etwa 10 liegen. Bei großem Motor und großem Rad sollte der Startwert bei etwa 30 liegen.
Sturzwinkel ist genau das, was es sagt. Ein positiver Sturzwinkel würde dazu führen, dass sich die Oberseite des Rads nach außen neigt. Ein negativer Sturzwinkel würde dazu führen, dass sich die Oberseite des Rads nach innen neigt. Obwohl dieser Wert in der Programmierung abgestimmt wird, würde die Abstimmung dieses Parameters später in der Abstimmung der Aufhängungsparameter behandelt werden.
Lenkungsabstimmung
Für eine bessere Fahrdynamik wird empfohlen, eine geschwindigkeitsabhängige Lenkung zu implementieren, um das Untersteuerproblem zu verringern und das Auto bei niedrigeren Geschwindigkeiten agiler zu machen. Dies lässt sich leicht bewerkstelligen, indem man den Steuereingang mit dem Geschwindigkeitsmesser dividiert und dann den resultierenden Wert mit einer Konstanten multipliziert. Ändern Sie dann den Lenkwinkel des Vorderrads auf 45 Grad. Der Startwert dieser Konstante sollte 15 sein. Erhöhen Sie für eine aggressivere Lenkung den Wert der Konstante und umgekehrt. Passen Sie diesen Wert so lange an, bis das Auto mit der größten Lenkbewegung lenkt.
Bremsbalance
Ähnlich wie beim Motorleistungstuning sollte auch der Programmierknoten für vordere Motorbremsung und hintere Motorbremsung getrennt werden, um die Bremsbalance anzupassen. Um mit dem Tuning der Bremsbalance für große Motoren zu beginnen, hat die Vorderradbremse normalerweise eine Bremskraft von 100, während die Hinterradbremse normalerweise eine Bremskraft von 20 hat. Eine Erhöhung der Bremskraft der Hinterachse würde dazu führen, dass das Auto beim Bremsen und Wenden übersteuert. Eine Verringerung der Bremskraft am Hinterrad würde dazu führen, dass das Auto beim Bremsen und Wenden untersteuert. Obwohl ein Startwert angegeben ist, sind viele Fahrversuche erforderlich, um die beste Bremsbalance zu erhalten. Normalerweise teste ich das Auto in der ersten Kurve der GP-Strecke von Monaco, die ich gebaut habe, um die beste Bremsbalance zu finden.
Teil 4:Federungseinstellung
Im Gegensatz zum vorherigen Abschnitt gibt es keinen guten Startwert für die Fahrwerksabstimmung. Daher ist der einzige Weg, um eine gute Fahrwerksabstimmung zu erreichen, strenge Testfahrten, die viel Zeit in Anspruch nehmen können. Ein Teil des Setups beinhaltet auch das Ändern der Geometrie der Platte, auf der der Motor montiert ist. Angesichts der Komplexität dieses Themas würde ich versuchen, es so weit wie möglich zu vereinfachen und mich an die Physik der Hauptbaugruppe zu halten.
Steifigkeit und Dämpfung
Vor einigen Updates haben die Entwickler die Möglichkeit aktiviert, die Steifigkeit und Dämpfung des Motorteils anzupassen, was den Autobauern viel mehr Möglichkeiten eröffnet. Um auf die Steifigkeit und Dämpfung des Motors zuzugreifen, markieren Sie einfach das Motorteil, indem Sie darauf klicken. Nachdem der Beschleunigungsschieber eingeblendet wurde, drücken Sie einfach T, um zu Steifigkeit und Dämpfung zu wechseln.
Wie bereits erwähnt, hat jedes Auto seine eigenen besten Steifigkeits- und Dämpfungswerte. Es gibt jedoch einige Richtlinien, die Sie befolgen sollten, um das beste Preis-Leistungs-Verhältnis zu finden.
- Die Hinterradaufhängung sollte etwas steifer sein als die Vorderradaufhängung, um Unebenheiten besser zu bewältigen und das Auto besser rollen zu lassen.
- Eine weiche Federung macht das Auto schwergängiger, rollt beim Wenden mehr, bewältigt aber Unebenheiten besser. Durch eine harte Federung fährt das Auto scharf, rollt beim Wenden weniger, bewältigt Unebenheiten jedoch schlechter. Manchmal kann es den mechanischen Grip verbessern, das Auto beim Abbiegen rollen zu lassen.
- Dämpfung eliminiert die Vibrationen des Autos, wenn es auf Unebenheiten trifft. Erhöhen Sie die Dämpfung, wenn das Auto zu stark vibriert, nachdem es auf eine Bodenwelle aufgefahren ist oder eine Kurve beendet hat.
Stabilisator und Sturz
Bei normalen Geländefahrzeugen kann ein Rollen des Autos erforderlich sein, um Unebenheiten zu beseitigen. Somit sollte die normale vertikale Montage ausreichen. Leider kann das Rollen bei Hochgeschwindigkeitsrennen schädlich sein und ein Stabilisator ist für Motorteile nicht verfügbar. Aber es gibt eine Technik, um mit dem übermäßigen Rollen umzugehen:
Mit dieser Methode wäre die Aufhängung steifer, wenn das Auto rollt, und weicher für normale Auf- und Abbewegungen. Das Rad hat jetzt jedoch zu viel negativen Sturz, der korrigiert werden muss, indem ein positiver Sturz in die Programmierung aufgenommen wird, um das Rad gerade zu richten.
Der Betrag des positiven Sturzes wird durch den gewünschten Sturz relativ zum Boden bestimmt. Bei Rädern in der Hauptbaugruppe ist ein Sturzwinkel von +- 2 Grad normalerweise das Maximum, sonst kann das Rad die Bodenhaftung verlieren. Hier sind einige allgemeine Auswirkungen von Sturzwinkeln:
- Die Erhöhung des positiven Sturzes erhöht die Stabilität und verbessert die Geländegängigkeit des Fahrzeugs, behindert jedoch die Kurvenfähigkeit.
- Die Erhöhung des negativen Sturzes erhöht den seitlichen Grip, verringert jedoch den Längsgrip. Zu viel negativer Sturz kann zu verringerter Beschleunigung und längerem Bremsweg führen.
- Normalerweise sollte das Hinterrad einen stärkeren negativen Sturz als das Vorderrad haben, um für Stabilität zu sorgen, aber die unterschiedliche Gewichtsverteilung des Fahrzeugs kann zu einem anderen Setup führen.
Rake and Toe Angle
Wenn das Auto einige Aerodynamikteile hat, ist es wichtig, die Neigung des Fahrzeugs zu berücksichtigen, da sie die aerodynamische Leistung des Fahrzeugs stark beeinflussen kann. Rake steht für die Höhe, um die das Heck relativ zur Front angehoben wird. Eine Erhöhung des Rake würde die Stabilität der Aerodynamik des Autos verbessern und das aerodynamische Zentrum nach vorne verschieben. Zu viel Rake würde jedoch einen übermäßigen Luftwiderstand erzeugen. Feintuning-Rechen können die Leistung eines Autos mit aerodynamischen Teilen erheblich verbessern. Aus diesem Grund hilft die Montage des Motors in der Mitte einer rechteckigen Platte bei diesem Teil des Tunings. Anstatt die Platte auf und ab zu bewegen, kann der Rechen fein eingestellt werden, indem der Rahmen gebogen wird, der das Rechteck bildet. Eine Faustregel für jedes Auto mit Aerodynamik ist, dass es wichtig ist, etwas Nachlauf zu halten, um sicherzustellen, dass das Auto nicht wie ein Mercedes-Benz SLR abhebt, wenn es auf die Unebenheiten trifft.
Der Spurwinkel bezieht sich auf den Winkel, in dem das Rad von oben gesehen auf die Fahrzeugmitte zu oder von ihr weg zeigt. Vorspur oder positive Spur bedeutet, dass die Räder von oben gesehen zur Mitte zeigen. Nachspur oder negative Spur bedeutet, dass die Räder von oben gesehen zur Mitte zeigen. Normalerweise würde eine Erhöhung des Spurwinkels die Höchstgeschwindigkeit verringern, und ein falscher Spurwinkel kann dazu führen, dass das Auto schwer zu fahren ist. Wenn Sie sich also nicht sicher sind, ist ein Spurwinkel von Null für Autos in der Hauptmontage normalerweise in Ordnung. Passen Sie die Spur nur an, wenn das Auto stark untersteuert oder das Auto bei hoher Geschwindigkeit nicht stabil ist.
Obwohl der Spurwinkel über die Lenkung eingestellt werden kann, wird dies normalerweise nicht empfohlen und kann zu Problemen beim Umgang mit Unebenheiten führen. Die Einstellung der Platte, auf der der Motor montiert ist, ist eine stabilere Option. Wenn die Anti-Roll-Installation bereits angebracht wurde, kann die Spureinstellung einfach erreicht werden, indem der vordere Rahmen oder der hintere Rahmen der Montageplatte etwas nach oben oder unten gedreht werden. Kurz gesagt, es muss einen Unterschied zwischen der Mittenhöhe der beiden Rahmen geben, um einen Zehenwinkel zu ergeben. Wenn der vordere Rahmen einen höheren Mittelpunkt als der hintere Rahmen hat, müssten die Räder abgeschleppt werden. Wenn der vordere Rahmen eine niedrigere Mitte als der hintere Rahmen hat, müssten die Räder gezogen werden. Für verschiedene Arten der Kraftverteilung würde der Spurwinkel unterschiedliche Dinge bewirken. Hier ist eine Liste, was jeder Zehenwinkel auf verschiedene Achsen und verschiedene Kraftverteilungseinstellungen tun würde:
- Bei Vorderrädern würde die Nachspur die Stabilität erhöhen, wenn Kraft aufgebracht wird, aber die Stabilität beim Bremsen und Wenden ohne Kraft verringern. Vorspur hätte genau die gegenteiligen Auswirkungen.
- Bei Hinterrädern würde die Vorspur die Stabilität beim Aufbringen von Kraft erhöhen, aber die Stabilität beim Bremsen und Wenden ohne Kraft verringern. Nachspur hätte genau die gegenteiligen Auswirkungen.
Und dennoch kann die beste Spureinstellung nur durch strenge Probefahrten gefunden werden.
Nachlaufwinkel und Ackerman-Lenkung
Der Nachlaufwinkel ist der Winkel der Lenkachse relativ zum Boden. Dieser Winkel würde bestimmen, wie stark die Lenkung in die Mitte zurückkehren würde. Da die Lenkung in der Hauptbaugruppe jedoch elektronisch gesteuert wird, ist diese Abstimmung nicht erforderlich.
Bei der Ackerman-Lenkung handelt es sich um einen Mechanismus, mit dem das Scheuern der Räder verringert wird, indem das äußere Rad beim Wenden weniger gelenkt wird als das innere Rad. Da die Lenkung, wie bereits erwähnt, elektronisch gesteuert wird, ist es möglich, einen solchen Lenkmechanismus per Programmierung zu implementieren. Leider habe ich keine Autorität zu diesem Thema, da ich diesen Mechanismus selten in meinem eigenen Build implementiere. Ich weiß jedoch, dass eine Erhöhung von Ackerman die Fähigkeit des Autos verbessern würde, Kurven mit niedriger Geschwindigkeit zu bewältigen, aber die Stabilität in Kurven mit hoher Geschwindigkeit verringern würde. Der Anti-Ackermann würde das Gegenteil tun. Daher kann für eine optimale Leistung (falls erforderlich) die Implementierung einer adaptiven Ackerman-Lenkung erforderlich sein. Andernfalls sollte bereits ein Ackerman-Winkel von null ausreichen, wenn die Implementierung dieses Mechanismus die Programmierung erschweren würde.
Teil 5:Elektronische Unterstützung (ABS und TCS)
Sowohl für ABS als auch für TCS wird nur das Funktionsprinzip behandelt. Der Grund für diesen Ansatz besteht darin, die Spieler nicht auf einen bestimmten Algorithmus zu beschränken und es den Spielern zu ermöglichen, eigene Algorithmen zu entwickeln. Und überraschenderweise ist das Prinzip, wie sie funktionieren, ziemlich ähnlich.
Ein entscheidender Teil von ABS und TCS ist die Radgeschwindigkeit. Um die Raddrehzahl zu berechnen, greifen wir zuerst den Programmierknoten, der die Drehzahl vom Motorteil in der Programmierung ausgibt. Die Einheit, die die Drehzahl ausgibt, ist Umdrehungen pro Sekunde. Wir können diese Zahl dann mit Pi und dem Durchmesser des Rads multiplizieren, um die Radgeschwindigkeit zu erhalten. Durch den Vergleich der Radgeschwindigkeit und der vom Tachometer gemessenen tatsächlichen Geschwindigkeit können wir die Bremsleistung und die Motorleistungsaufnahme regulieren, um das Durchdrehen der Räder und das Blockieren der Bremse zu reduzieren. Reduzieren Sie bei ABS die Bremseingabe, wenn die Radgeschwindigkeit niedriger als die tatsächliche Geschwindigkeit ist. Reduzieren Sie für TCS die Leistungsaufnahme, wenn die Radgeschwindigkeit höher als die Bremsaufnahme ist. Ein wichtiger Hinweis für ABS und TCS ist, dass ein gewisses Maß an Durchdrehen der Räder zugelassen werden sollte, um das Beste aus dem Rad herauszuholen. Das Tuning dieses Wheelspin-Levels ist ein Teil des Tunings von ABS und TCS.
Wenn der erweiterte Modus aktiviert ist, ist Torque-Vectoring und Brake-Vectoring auch durch Hinzufügen eines Gyroskops erreichbar. Durch die Überwachung der Rotationsgeschwindigkeit des Fahrzeugs mit einem Gyroskop ist es möglich, die Geschwindigkeit auf jeder Seite des Autos zu berechnen. Verwenden Sie dann den Spiegelmodus für den Motorteil (Rot ist rechts, Blau ist links und ich könnte mich irren). Es ist möglich, die Leistungsaufnahme und die Bremsaufnahme einer einzelnen Fahrzeugseite zu begrenzen. Dadurch kann das Geschwindigkeits-/Leistungsverhältnis der Vorderräder dem Geschwindigkeits-/Leistungswert der Hinterräder entsprechen, ohne dass Untersteuern befürchtet werden muss.
Die meisten meiner Performance-Car-Builds verfügen jetzt über Torque Vectoring TCS, aber ich implementiere selten ABS. Einige meiner älteren Builds verfügen tatsächlich über ABS, aber ich habe sie aufgrund eines seltsamen Fehlers, der ABS beschädigen kann, nicht mehr verwendet:Bremsfehler.
Teil 6:Fehler und Tricks
Bremsfehler
Dies ist ein sehr gefährlicher Fehler, dessen Verwendung große Vorsicht erfordert. Es stellt sich heraus, dass bei einer niedrigen Bremseingabe (etwa 0,2) der Motor zuerst sehr schnell beschleunigt, bevor er langsamer wird. Bei der Verwendung von ABS besteht die Gefahr, dass das Auto aufgrund dieses Fehlers gegen eine Wand geschickt wird. Als der Spieler, der diesen Fehler zuerst entdeckt und der Community gemeldet hat, habe ich auch einen Weg gefunden, diesen Fehler auszunutzen. Ich sehe zuerst, ob ich das Rad mit lächerlicher Geschwindigkeit drehen kann, indem ich mit einem Controller leicht auf die Bremse tippe. Nachdem ich die drastische Geschwindigkeitssteigerung sehe, automatisiere ich den Prozess mit der Programmierung. Hier ist ein Beispiel für ein Auto, bei dem ich den Bremsfehler aktiv genutzt habe, um eine hohe Geschwindigkeit zu erreichen:
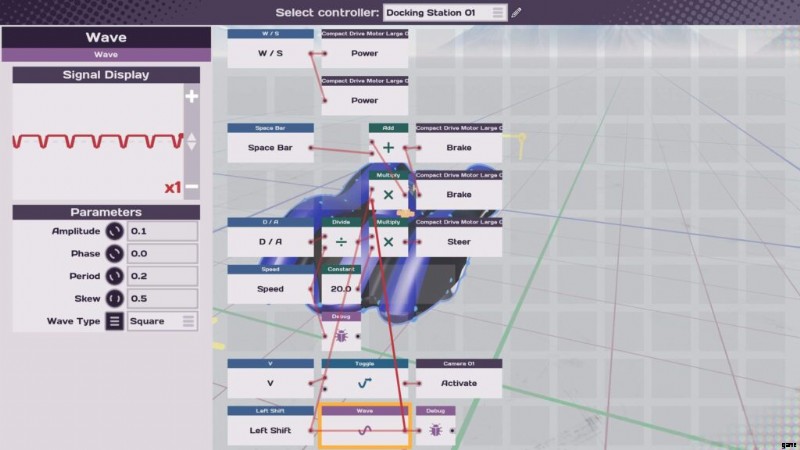
Dies ist der LMC Pegasus Salt Runner von 1936, der von Jerry Heartland und mir entwickelt wurde, der den Bremsfehler hinzugefügt hat. Indem die Wellenfunktion so eingestellt wird, dass sie die im Bild gezeigte Periode und Schräglage aufweist, und die Größe basierend auf dem Bremswert des Motors angepasst wird, ist es möglich, den Motor zu zwingen, sich mit seiner Höchstgeschwindigkeit zu drehen. Dieser Fehler ermöglicht es, eine niedrigere Geschwindigkeitseinstellung des Motors zu verwenden, was eine höhere Höchstgeschwindigkeit bedeutet. In diesem Beispiel erreicht das Auto eine Höchstgeschwindigkeit von 320 km/h.
Allerdings ist, genau wie im echten Leben, nichts kostenlos. Indem der Motor gezwungen wird, sich mit einer höheren Geschwindigkeit als von den Entwicklern beabsichtigt zu drehen, leidet auch die Stabilität der Simulation darunter. Das heißt, wenn die Geschwindigkeit:Leistungseinstellung zu niedrig wird, kann das Auto in einen unkontrollierbaren Zustand versetzt werden. Dieser Effekt ist extrem stark, wenn kleine und mittlere Räder verwendet werden. Daher gibt es einen Mindestgeschwindigkeits-Leistungswert, bevor die Räder fliegen, und dieser Wert kann nur bei Testfahrten gefunden werden. Bei Autos mit großen Rädern ist die Verwendung dieses Fehlers notwendig, um das Auto schnell genug zu beschleunigen, um mit kleineren Autos konkurrieren zu können. Aufgrund der großen Stabilität großer Räder würde sich der Motor bis auf die Mehrleistung noch normal verhalten. Um das Beste aus diesem Fehler herauszuholen, müsste das Geschwindigkeits-/Leistungsverhältnis mit einem ähnlichen, zuvor eingeführten Verfahren neu abgestimmt werden, um ein gutes Gleichgewicht zwischen Höchstgeschwindigkeit und Beschleunigung zu erreichen.
Fügen Sie den Rädern Gewicht hinzu
Einer der nervigsten Teile der Physik der Hauptbaugruppe ist die Simulation der Radphysik. Ich habe es mehrfach auf dem Discord-Server erwähnt, aber die Entwickler haben noch keinen Plan zur Behebung des Problems ausgearbeitet. Daher müssen wir mit dem Radschlag leben. Das Aufprallen der Räder ist am deutlichsten, wenn kleine Räder und mittelgroße Räder verwendet werden. Eine Möglichkeit, diesem Effekt entgegenzuwirken, besteht darin, den Rädern 1 kg Gewicht hinzuzufügen. Dies würde das Radspringen etwas reduzieren und zu einer besseren Fahrdynamik führen. Aufgrund der großen Masse des großen Rades ist keine Masse erforderlich, um dem Radschlag entgegenzuwirken.
Bug Aero
Aufgrund der geringeren Geschwindigkeit des Autos hat ein realistisch aussehendes Aero-Gerät normalerweise nur einen sehr geringen Einfluss auf die Bodenhaftung des Autos. Aber es gibt einen Trick, um die aerodynamische Effizienz der aerodynamischen Vorrichtungen am Auto zu verbessern, den ich Bug Aero nenne.
Bei der Berechnung der aerodynamischen Wirkung einer Platte würde das Spiel sowohl ihren Anstellwinkel als auch ihre Krümmung berücksichtigen. Wenn die Krümmung einer Platte hoch ist, wäre auch die aerodynamische Wirkung der Platte hoch. Eine bestimmte Kombination aus Anstellwinkel und Krümmung würde zu Flügeln führen, die einen negativen Luftwiderstand oder Schub erzeugen können. Dieser Effekt wurde zuerst von Leiywen entdeckt und dokumentiert und von mir weiter ausgenutzt. Um eine Auftriebsfläche mit einem unglaublichen Verhältnis von Auftrieb zu Luftwiderstand zu erhalten, muss die Auftriebsfläche einen Querschnitt wie diesen haben:
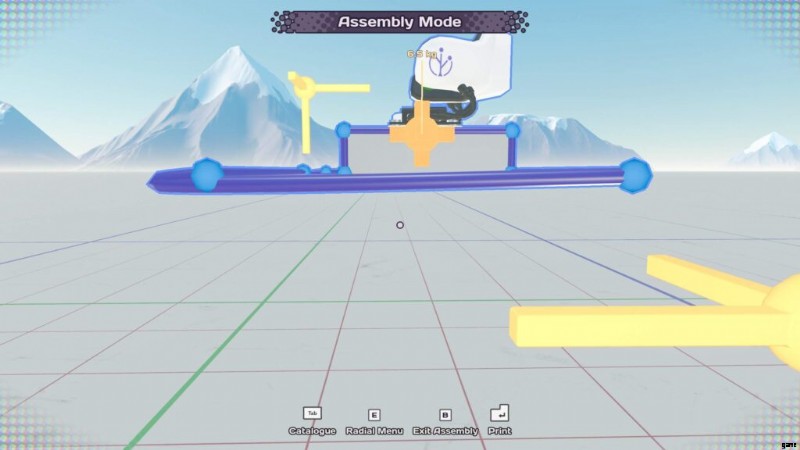
Obwohl die Platte nahezu flach ist, ist sie nicht vollständig flach. Diese kleine Wölbung stellt sicher, dass der Auftrieb nach unten zeigt und Abtrieb erzeugt. In ähnlicher Weise ist es durch Umklappen der Wölbung möglich, den Auftrieb nach oben zu drehen und den effizientesten Flügel zu erzeugen. Dies ist das Querschnittsprofil, das ich für meine Helikopterblätter verwende.
Durch die Verteilung dieser aerodynamischen Oberflächen um das Auto herum ist es möglich, einen wahnsinnigen Abtrieb zu erzeugen, ohne zu viel Luftwiderstand zu erzeugen. Ein zu starker Missbrauch dieser Oberflächen kann jedoch zu einem unrealistischen Fahrverhalten und schwer abzustimmenden Autos führen, also seien Sie sich dessen bewusst.
Aerodynamisches Auswuchten
Wenn ein Auto jedoch eine schreckliche aerodynamische Balance hat, kann es am Ende immer noch schrecklich fahren. Eine einfache Möglichkeit, das aerodynamische Gleichgewicht zu überprüfen, besteht darin, das Auto aus unglaublicher Höhe fallen zu lassen. Wenn das Auto gerade nach unten fällt, ohne dass es dazu neigt, sich nach oben oder unten zu neigen, ist die aerodynamische Balance normalerweise in Ordnung.